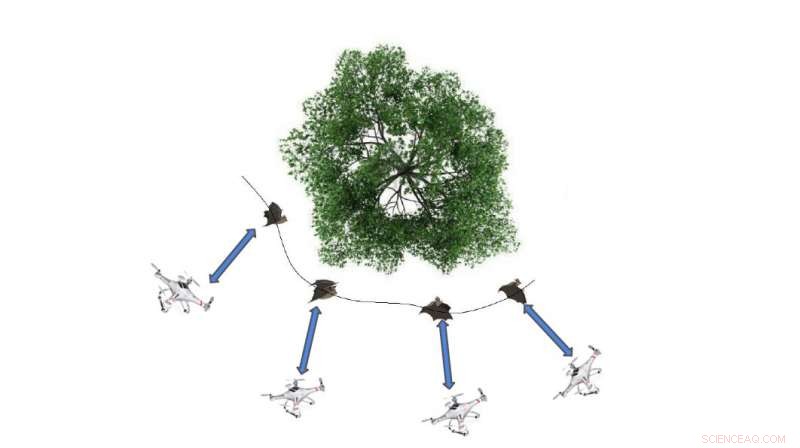
Un drone quadrirotor naviguant dans un arbre, imitant le comportement des chauves-souris. Crédit :Tanveer et al.
Dans les années récentes, des chercheurs du monde entier ont essayé de développer des techniques informatiques qui reproduisent les comportements des humains ou des animaux dans des robots et des machines. Ceci comprend, par exemple, la structure et le fonctionnement du cerveau humain, la capacité de communication en essaim des abeilles, les styles de locomotion d'espèces spécifiques de poissons ou d'amphibiens, et beaucoup plus.
Fort des acquis des études précédentes, des chercheurs de Virginia Tech et de l'Université du Maryland ont récemment introduit un cadre de simulation qui pourrait être utilisé pour recréer le comportement des chauves-souris dans des drones à quatre rotors. Ce modèle, présenté dans un article pré-publié sur arXiv, est né d'une collaboration entre Rolf Müller, un expert en détection biosonar, les statisticiens Xiaowei Wu et Hongxiao Zhu, et informaticien Pratap Tokekar, financé par la National Science Foundation (NSF).
"Notre idée générale était de construire des drones capables de recréer le comportement d'une chauve-souris tout en naviguant dans un complexe, milieux naturels, " Zhu a déclaré à TechXplore. " Dans cette étude particulière, notre objectif principal était de construire un cadre informatique pour simuler les environnements de détection des chauves-souris et produire des signaux biosonaires simulés à des fins d'entraînement et de test."
Le cadre de simulation développé par Zhu et ses collègues se compose d'un modèle pour simuler la géométrie des forêts aléatoires avec des arbres et d'un modèle qui génère des signaux de biosonar. Les signaux du biosonar sont des sons courts produits par les chauves-souris et autres animaux, y compris les baleines et les dauphins. Ces sons génèrent des échos qui contiennent des informations précieuses sur l'environnement environnant, aider les animaux dans leur navigation, ainsi que dans leurs efforts de chasse et de recherche de nourriture.
Le premier composant du nouveau framework est un modèle qui fournit des informations détaillées sur les environnements aléatoires. Le deuxième composant imite les mécanismes biologiques qui permettent la navigation guidée par biosonar chez les chauves-souris, produisant des échos simulés qui contiennent des informations sur l'environnement du robot.
L'approche de simulation conçue par Zhu et ses collègues présente plusieurs caractéristiques et avantages uniques. L'un des plus remarquables est qu'il permet à des simulations aléatoires de s'exécuter à plusieurs reprises, ainsi, il peut produire des données sensorielles riches qui seraient plus difficiles à rassembler en utilisant des approches expérimentales plus traditionnelles.
"Les principaux succès de la robotique jusqu'à présent ont été limités, des environnements structurés tels que des entrepôts et des environnements industriels, " Tokékar, co-investigateur de l'étude, a déclaré TechXplore. « Il y a beaucoup d'intérêt à utiliser des drones dans des environnements non structurés tels que les forêts et les zones à végétation dense. Pour ne citer que deux exemples :la DARPA a récemment conclu son Fast, Poids léger, Programme d'autonomie, où, comme le suggère la même chose, l'accent a été mis sur les drones agiles opérant dans des environnements forestiers, tandis que le Army Research Lab a annoncé un nouveau programme appelé SARA avec un objectif très similaire en tête. »
Selon Tokekar, la nature offre d'innombrables exemples de comportements qui, si reproduit artificiellement, pourrait être extrêmement utile dans les applications robotiques. Les capacités de navigation assistée par biosonar observées chez les chauves-souris, sur lequel porte leur étude, pourrait spécifiquement aider à améliorer la navigation et la détection d'objets dans les robots volants.
À l'avenir, la plateforme de simulation développée par Zhu, Tokekar et leurs collègues pourraient être utilisés pour reproduire ce comportement particulier de chauve-souris dans des drones autonomes à quatre rotors. En outre, cela pourrait aider les chercheurs à évaluer et à comparer différents algorithmes de navigation inspirés des chauves-souris dans des environnements simulés.
"L'aspect le plus significatif de notre travail est qu'il fournit une plate-forme pratique pour la formation et le test d'algorithmes robotiques bio-inspirés pour les drones, " dit Zhu. " Dans nos prochaines études, nous prévoyons de former et de tester des algorithmes robotiques pour différentes tâches de navigation en utilisant les données Biosonar générées dans ce cadre."
© 2020 Réseau Science X