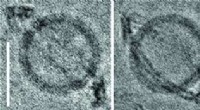
Le passage d'objet entre la main humaine et la main du robot Crédit :© Scuola Superiore Sant'Anna
Il y a un moment où la coopération réussie entre les humains et les robots a une importance décisive - quand l'un doit remettre un objet à l'autre, et donc, coordonner leurs actions en conséquence. Les chercheurs souhaitent rendre cette interaction plus naturelle pour les robots.
Une nouvelle étude intitulée « Sur le choix du type et de l'emplacement de préhension lors de la remise d'un objet, " Publié dans Robotique scientifique par une équipe de recherche de l'Institut BioRobotics de la Scuola Superiore Sant'Anna et du Centre australien de vision robotique, révèle les principes directeurs qui régissent le choix du type de prise lors d'un échange d'objets, encourager la coopération entre un système robotique et une personne.
L'étude, réalisé en 2018, analysé le comportement des personnes lorsqu'elles saisissent un objet et le remettent à un partenaire. Les chercheurs ont étudié le choix de la prise et le placement de la main sur ces objets lors d'un transfert lorsque les tâches suivantes sont effectuées par le récepteur. Les passants ont tendance à saisir la partie intentionnelle des objets et à laisser des « poignées » dégagées pour les récepteurs. Intuitivement, ce choix permet aux récepteurs d'effectuer confortablement des tâches ultérieures avec les objets.
"On s'en est rendu compte, à ce jour, une attention insuffisante a été accordée à la façon dont un robot saisit un objet dans les études sur l'interaction homme-robot, " explique Francesca Cini, doctorat étudiant du BioRobotics Institute et l'un des deux principaux auteurs de l'article. « Cet aspect est très central dans ce domaine. Par exemple, quand on passe un tournevis sachant que le récepteur doit s'en servir, on laisse la poignée libre pour faciliter la préhension et l'utilisation ultérieure de l'objet. L'objectif de notre recherche est de transférer tous ces principes directeurs sur un système robotique afin qu'ils soient utilisés pour sélectionner un type de préhension correct et pour faciliter l'échange d'objets."