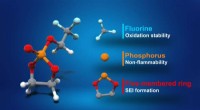
Les informaticiens de l'UC Berkeley ont développé un algorithme qui utilise l'apprentissage par renforcement pour générer des simulations réalistes du mouvement humain et animal, comme ce backflip en temps réel. Le même algorithme fonctionne pour 25 figures acrobatiques et de danse, avec un mois d'apprentissage requis par compétence. Crédit :Jason Peng, UC Berkeley
Il est toujours facile de distinguer les mouvements simulés par ordinateur de la réalité - sur grand écran ou dans les jeux vidéo, les humains et les animaux simulés se déplacent souvent maladroitement, sans le rythme et la fluidité de leurs homologues du monde réel.
Mais ça change. Université de Californie, Les chercheurs de Berkeley ont maintenant fait une avancée majeure dans l'animation par ordinateur réaliste, utiliser l'apprentissage par renforcement profond pour recréer des mouvements naturels, même pour des prouesses acrobatiques comme le break dance et les arts martiaux. Les personnages simulés peuvent également répondre naturellement aux changements de l'environnement, comme se remettre d'un trébuchement ou d'être touché par des projectiles.
"C'est en fait un grand pas en avant par rapport à ce qui a été fait avec l'apprentissage en profondeur et l'animation. Dans le passé, beaucoup de travail a été consacré à la simulation de mouvements naturels, mais ces méthodes basées sur la physique ont tendance à être très spécialisées; ce ne sont pas des méthodes générales qui peuvent gérer une grande variété de compétences, ", a déclaré Xue Bin "Jason" Peng, étudiant diplômé de l'UC Berkeley. Chaque activité ou tâche nécessite généralement son propre contrôleur conçu sur mesure.
"Nous avons développé des agents plus capables qui se comportent de manière naturelle, " dit-il. " Si vous comparez nos résultats à la capture de mouvement enregistrée par des humains, nous arrivons au point où il est assez difficile de distinguer les deux, pour dire ce qu'est la simulation et ce qui est réel. Nous nous dirigeons vers un cascadeur virtuel."
Les travaux pourraient également inspirer le développement de capacités motrices plus dynamiques pour les robots.
Un article décrivant le développement a été accepté sous condition pour présentation à la conférence SIGGRAPH 2018 en août à Vancouver, Canada, et a été mis en ligne le 10 avril. Les collègues de Peng au Département de génie électrique et d'informatique sont le professeur Pieter Abbeel et le professeur adjoint Sergey Levine, avec Michiel van de Panne de l'Université de la Colombie-Britannique.
Mocap pour DeepMimic
Les techniques traditionnelles d'animation nécessitent généralement de concevoir des contrôleurs personnalisés à la main pour chaque compétence :un contrôleur pour la marche, par exemple, et un autre pour courir, flips et autres mouvements. Ces contrôleurs conçus à la main peuvent avoir l'air plutôt bien, dit Peng.
Alternativement, méthodes d'apprentissage par renforcement profond, comme GAIL, peut simuler une variété de compétences différentes à l'aide d'un seul algorithme général, mais leurs résultats semblent souvent très artificiels.