Un robot métamorphe construit à partir de smarticles montre une nouvelle stratégie de locomotion
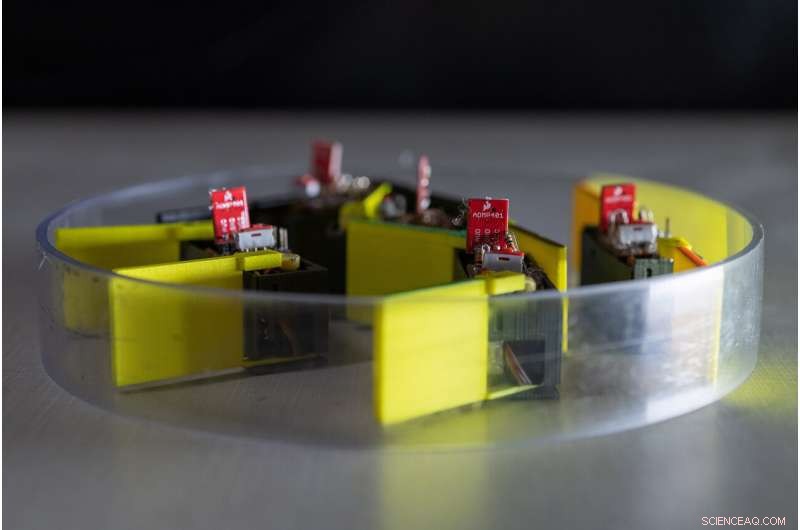
Cinq "smarticles" identiques - des particules actives intelligentes - interagissent les unes avec les autres dans une enceinte. En se donnant du coude, le groupe - surnommé un "supersmarticle" - peut se déplacer de manière aléatoire. Crédit :Georgia Tech, Rob feutre
La construction de robots conventionnels nécessite généralement de combiner soigneusement des composants tels que des moteurs, piles, actionneurs, segments du corps, jambes et roues. Maintenant, les chercheurs ont adopté une nouvelle approche, construire un robot entièrement à partir de robots plus petits appelés "smarticles" pour débloquer les principes d'une technique de locomotion potentiellement nouvelle.
Les smarticles imprimées en 3D, abréviation de particules actives intelligentes, ne peuvent faire qu'une seule chose :battre leurs deux bras. Mais quand cinq de ces smarticles sont confinés dans un cercle, ils commencent à se donner du coude, formant un système robophysique connu sous le nom de "supersmarticle" qui peut se déplacer par lui-même. L'ajout d'un capteur de lumière ou de son permet à la supersmarticle de se déplacer en réponse au stimulus et même d'être suffisamment bien contrôlée pour naviguer dans un labyrinthe.
Bien que rudimentaire maintenant, l'idée de fabriquer des robots à partir de robots plus petits - et de tirer parti des capacités de groupe qui découlent de la combinaison d'individus - pourrait fournir un contrôle mécanique sur de très petits robots. Finalement, le comportement émergent du groupe pourrait fournir une nouvelle approche de locomotion et de contrôle pour les petits robots qui pourraient potentiellement changer de forme.
"Ce sont des robots très rudimentaires dont le comportement est dominé par la mécanique et les lois de la physique, " a déclaré Dan Goldman, un professeur de la famille Dunn à l'École de physique du Georgia Institute of Technology. "Nous ne cherchons pas à mettre un contrôle sophistiqué, la détection et le calcul sur eux tous. À mesure que les robots deviennent de plus en plus petits, nous devrons utiliser les principes de la mécanique et de la physique pour les contrôler car ils n'auront pas le niveau de calcul et de détection dont nous aurions besoin pour un contrôle conventionnel."














