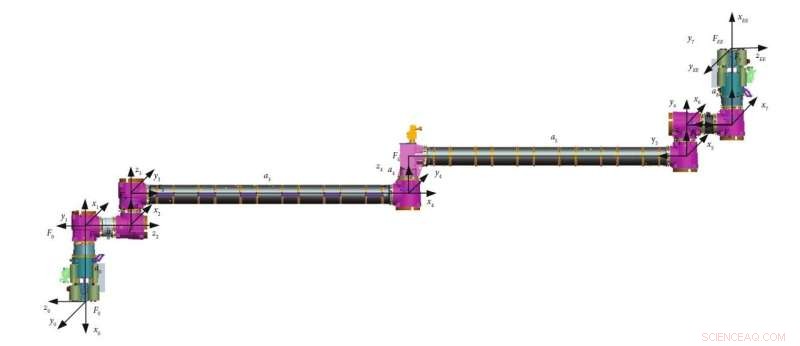
Dans la recherche, les résultats de simulation de notre algorithme de contrôle adaptatif composite récursif sont présentés en comparaison avec l'algorithme de contrôle adaptatif direct. Les cadres de coordonnées du manipulateur de la station spatiale chinoise sont tracés ici. Crédit :Espace :Science et technologie
Dans le processus de construction et d'entretien de routine de la Station spatiale chinoise, le manipulateur joue un rôle très important qui peut accomplir certaines tâches clés, telles que l'amarrage de transposition, l'entretien quotidien et les activités extravéhiculaires auxiliaires. La haute précision et les performances dynamiques du manipulateur sont nécessaires à la réussite de ces tâches, qui peuvent souvent être maintenues par des commandes conçues sur la base du modèle dynamique.
Cependant, dans les situations pratiques, il est généralement irréaliste d'obtenir tous les paramètres d'inertie avec précision. Par conséquent, le contrôle adaptatif est développé pour assurer la convergence du contrôle de suivi même si le système a des paramètres incertains ou à évolution lente. Dans un article de recherche récemment publié dans Space :Science &Technology , le Dr Li du State Key Laboratory of Management and Control for Complex Systems, a proposé une nouvelle implémentation récursive du contrôle adaptatif composite pour les robots manipulateurs.
Tout d'abord, le Dr Li a revisité le contrôleur adaptatif composite proposé par Slotine et Li. Le contrôle adaptatif peut assurer la convergence du contrôle de suivi même si le système a des paramètres incertains ou qui changent lentement. De manière générale, ce schéma peut être divisé en deux classes nommées l'adaptation directe et l'adaptation indirecte selon le signal qui pilote la loi de mise à jour des paramètres.
Dans la première catégorie, la mise à jour des paramètres est pilotée par les erreurs de suivi, tandis que dans la deuxième catégorie, les paramètres sont modifiés en fonction des erreurs de prédiction, généralement des couples articulaires filtrés. Le contrôle adaptatif basé sur les erreurs de suivi peut généralement garantir une convergence globale du suivi; cependant, la convergence des paramètres estimés a des conditions plus strictes. En comparaison, la commande adaptative indirecte a une vitesse de convergence des paramètres plus rapide, mais il est généralement difficile d'obtenir la stabilité des erreurs de poursuite.
En combinant les deux méthodes, le contrôleur adaptatif composite bien connu présente les avantages des deux, dans lequel l'adaptation des paramètres est pilotée à la fois par les erreurs de suivi et les erreurs de prédiction. Cependant, la complexité de calcul de ces méthodes de contrôle adaptatif est une limitation principale dans les robots manipulateurs pratiques, en particulier pour le cas avec un degré de liberté élevé. Jusqu'à présent, seuls quelques travaux se sont intéressés à l'exécution récursive du contrôleur adaptatif indirect ou du contrôleur adaptatif composite, probablement parce que l'utilisation de l'erreur de prédiction exprimée par la matrice de régression rend très difficile la réduction de l'ordre de la complexité de calcul.
Afin de résoudre les difficultés susmentionnées, le Dr Li a réécrit la formulation de Newton-Euler en utilisant la forme de matrices générales de l'algorithme récursif classique de Newton-Euler. Ensuite, la méthode de contrôle adaptatif composite récursif est conçue et la stabilité de la méthode proposée est vérifiée en sélectionnant une fonction de Lyapunov appropriée. La complexité de calcul de l'adaptation composite récursive proposée est bien inférieure à celle des études existantes. La raison en est que dans le contrôleur composite d'origine, aucune considération n'a été consacrée à ses aspects informatiques. Étant donné que la charge de calcul des contrôleurs proposés est à la même échelle que les contrôleurs adaptatifs directs récursifs, une comparaison entre ces deux méthodes est effectuée.
Les résultats montrent que les erreurs de suivi sont évidemment réduites en utilisant le contrôleur adaptatif composite récursif, et les estimations des paramètres convergent plus rapidement avec le contrôleur adaptatif composite récursif. Dans la partie simulation, le manipulateur de la station spatiale chinoise est utilisé comme exemple de simulation, et les résultats vérifient l'efficacité de l'algorithme récursif proposé. De plus, étant donné que la charge de calcul est linéaire avec le nombre d'articulations, la méthode proposée est attrayante, en particulier pour le manipulateur multijoint redondant.