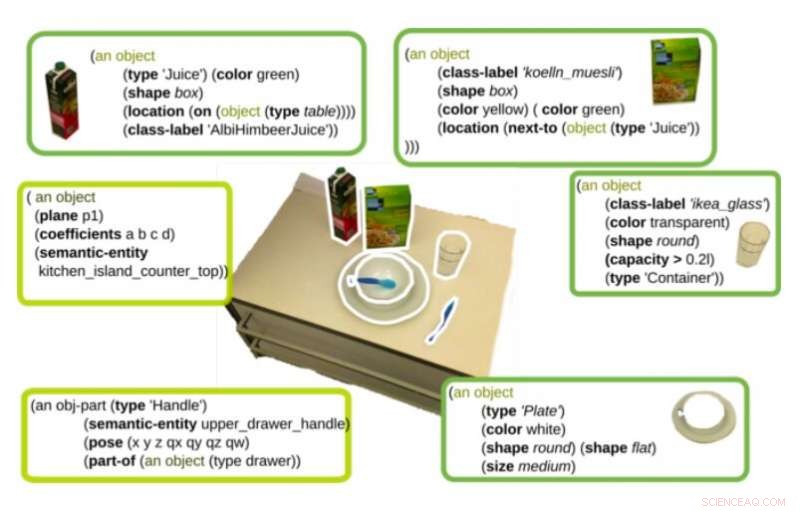
Une description sémantiquement riche d'une scène de petit-déjeuner. Crédit :Bálint-Benczédi et al.
Au cours de la dernière décennie, les avancées du machine learning ont permis le développement de systèmes de plus en plus autonomes, y compris les véhicules autonomes, assistants virtuels et robots mobiles. Entre autres, les chercheurs qui développent des systèmes autonomes doivent identifier des moyens d'intégrer des composants conçus pour s'attaquer à des sous-tâches différentes mais complémentaires.
Par exemple, un robot qui effectue des tâches manuelles dans la maison d'un utilisateur humain devrait être capable de détecter des objets dans son environnement tout en récupérant des informations sur ces objets qui peuvent ensuite être utilisées pour planifier ses mouvements et ses actions. Ce processus, également connu sous le nom de paradigme « perception-cognition-action », est d'une importance cruciale, car il permet finalement au robot de proposer des stratégies utiles et d'accomplir efficacement des tâches.
Jusque là, la plupart des méthodes pour mettre en œuvre ce paradigme perception-cognition-action chez les robots traitent ces trois tâches comme des modules presque entièrement indépendants qui agissent comme des boîtes noires les uns pour les autres. Une équipe de chercheurs de l'Université de Brême et de l'Université de Munich en Allemagne, cependant, croit que lier le système de « perception » d'un robot à sa cognition (c'est-à-dire, sa capacité à « raisonner » ou à récupérer des informations sur des objets dans l'environnement environnant) pourrait améliorer considérablement ses performances globales.
Avec ça en tête, les chercheurs ont récemment développé un système de perception cognitive qui pourrait améliorer les performances des robots mobiles dans les tâches de manipulation quotidiennes. Ce système, surnommé ROBOSHERLOCK, atteint la perception via l'analyse de contenu (CA), une stratégie qui implique l'utilisation de méthodes statistiques pour analyser de grandes quantités de données.
Les données analysées par ROBOSHERLOCK sont « non structurées, " comme sa structure ne reflète pas la sémantique qui lui est associée, comme dans une base de données ou un tableur. Le système utilise ainsi une stratégie dite de gestion de l'information non structurée (UIM), ce qui signifie essentiellement qu'il peut traiter de grandes quantités de données non structurées (par exemple, documents texte, fichiers audio, images, etc.) à l'aide d'un ensemble d'algorithmes d'extraction d'informations. Chacun de ces algorithmes extrait différents types de connaissances en fonction de son « expertise, " et ils sont ensuite évalués et combinés pour parvenir à une seule décision cohérente.
"Dans ROBOSHERLOCK, la perception et l'interprétation de scènes réalistes sont formulées comme un problème de gestion de l'information non structurée (UIM), " les chercheurs ont écrit dans leur article. " L'application du principe UIM prend en charge la mise en œuvre de systèmes de perception qui peuvent répondre à des requêtes pertinentes pour les tâches sur les objets d'une scène, augmenter les performances de reconnaissance d'objets en combinant les forces de plusieurs algorithmes de perception, prennent en charge le raisonnement basé sur les connaissances sur les objets et permettent la génération automatique et axée sur les connaissances de pipelines de traitement.
Les chercheurs ont évalué leur cadre dans une série de tests, en l'appliquant à différents systèmes pour la perception de scènes du monde réel. Ils ont découvert que le « raisonnement » à propos de (c'est-à-dire, traitement) les connaissances de base récupérées par ses algorithmes permettent à ROBOSHERLOCK de répondre à une grande variété de questions, le dépassement de l'était est directement perceptible dans le milieu environnant.
Les composants de ROBOSHERLOCK présentés par les chercheurs dans leur étude récente pourraient être considérés comme ses fonctionnalités de base. Ensuite, les chercheurs ont également développé plusieurs extensions qui améliorent les capacités cognitives du système. Par exemple, ils ont créé une extension qui permet au système de détecter simultanément les humains et les objets, raisonner sur les actions que les humains effectuent et les intentions derrière ces actions.
"Plus récemment, nous avons étudié comment le framework ROBOSHERLOCK peut permettre aux agents de "rêver" et en utilisant des moteurs de jeu de pointe, générer des variations d'une tâche et apprendre de nouveaux modèles de perception, " ont écrit les chercheurs dans leur article. " Toutes ces extensions examinent la perception du robot du point de vue d'un robot effectuant des tâches, ce qui n'aurait pas été possible sans le cadre de base présenté ici. »
© 2019 Réseau Science X