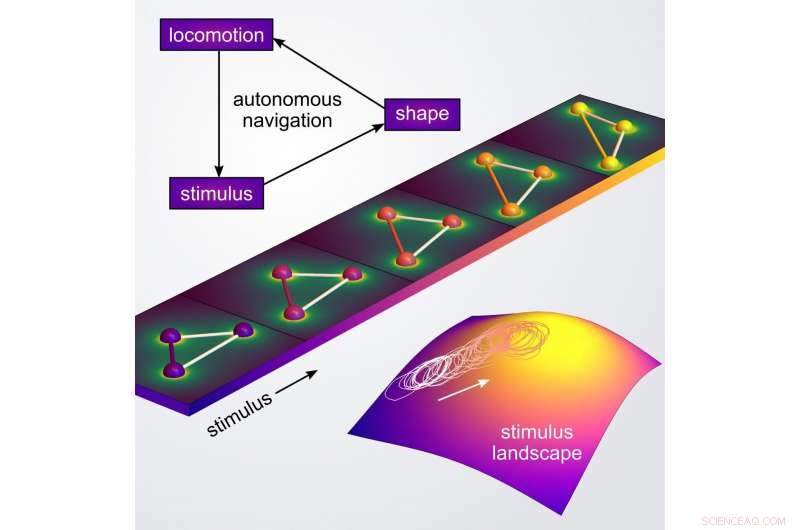
Un schéma du mécanisme de navigation autonome via le changement de forme Crédit :Yong Dou/Columbia Engineering
La plupart des matières synthétiques, y compris celles des électrodes de batterie, membranes polymères, et catalyseurs, se dégradent avec le temps car ils n'ont pas de mécanismes de réparation internes. Si vous pouviez distribuer des microrobots autonomes au sein de ces matériaux, Ensuite, vous pouvez utiliser les microrobots pour effectuer en permanence des réparations de l'intérieur. Une nouvelle étude du laboratoire de Kyle Bishop, professeur agrégé de génie chimique, propose une stratégie pour les robots microscopiques capables de détecter les symptômes d'un défaut matériel et de naviguer de manière autonome vers le site du défaut, où des actions correctives pourraient être effectuées. L'étude a été publiée dans Examen physique de la recherche 2 décembre 2019.
Les bactéries nageuses recherchent des régions à forte concentration en nutriments en intégrant des capteurs chimiques et des moteurs moléculaires, un peu comme une voiture autonome qui utilise les informations des caméras et d'autres capteurs pour sélectionner une action appropriée pour atteindre sa destination. Les chercheurs ont tenté d'imiter ces comportements en utilisant de petites particules propulsées par des carburants chimiques ou d'autres apports énergétiques. Alors que les variations spatiales de l'environnement (p. dans la concentration du carburant) peut agir pour orienter physiquement la particule et ainsi diriger son mouvement, ce type de navigation a des limites.
« Les particules automotrices existantes ressemblent plus à un train en fuite dirigé mécaniquement par des rails sinueux qu’à une voiture autonome guidée de manière autonome par des informations sensorielles, " dit Bishop. "Nous nous sommes demandé si nous pouvions concevoir des robots à micro-échelle avec des capteurs et des actionneurs matériels qui naviguent davantage comme des bactéries."
L'équipe de Bishop développe une nouvelle approche pour coder la navigation autonome des microrobots basée sur des matériaux à changement de forme. Caractéristiques locales de l'environnement, comme la température ou le pH, déterminer la forme tridimensionnelle de la particule, qui à son tour influence son mouvement automoteur. En contrôlant la forme de la particule et sa réponse aux changements environnementaux, les chercheurs modélisent comment les microrobots peuvent être conçus pour nager vers le haut ou vers le bas des gradients de stimulus, même ceux trop faibles pour être directement ressentis par la particule.
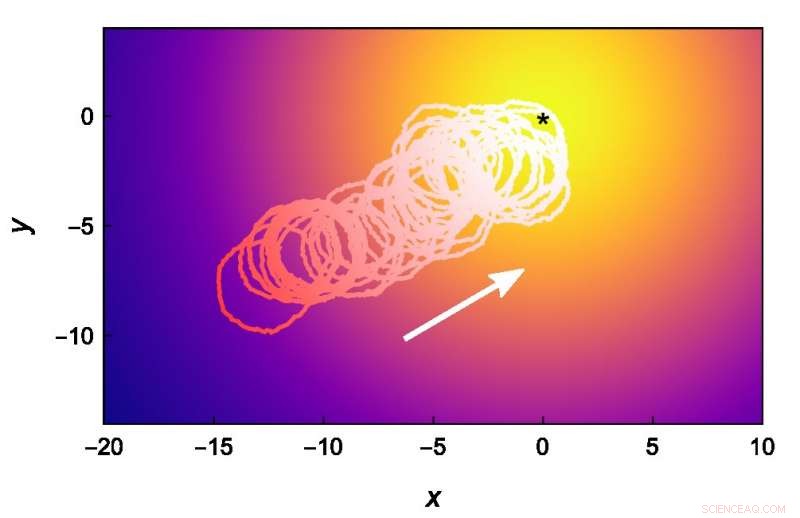
Trajectoire de navigation simulée dans des environnements bruyants et complexes. Crédit :Yong Dou/Columbia Engineering
"Pour la première fois, nous montrons comment des matériaux réactifs pourraient être utilisés comme ordinateurs de bord pour des robots microscopiques, plus petit que l'épaisseur d'un cheveu humain, qui sont programmés pour naviguer de façon autonome, " dit Yong Dou, un co-auteur de l'étude et un doctorat. étudiant au laboratoire de Bishop. "De tels microrobots pourraient effectuer des tâches plus complexes telles que la détection distribuée de défauts matériels, livraison autonome de cargaison thérapeutique, et réparations à la demande des matériaux, cellules, ou des tissus."
L'équipe de Bishop met actuellement en place des expériences pour démontrer en pratique leur stratégie de navigation théorique pour les microrobots, en utilisant des matériaux à changement de forme tels que des élastomères à cristaux liquides et des alliages à mémoire de forme. Ils espèrent montrer que les expériences prouveront que, sensibles aux stimuli, Les microparticules à changement de forme peuvent utiliser une rétroaction technique entre la détection et le mouvement pour naviguer de manière autonome.