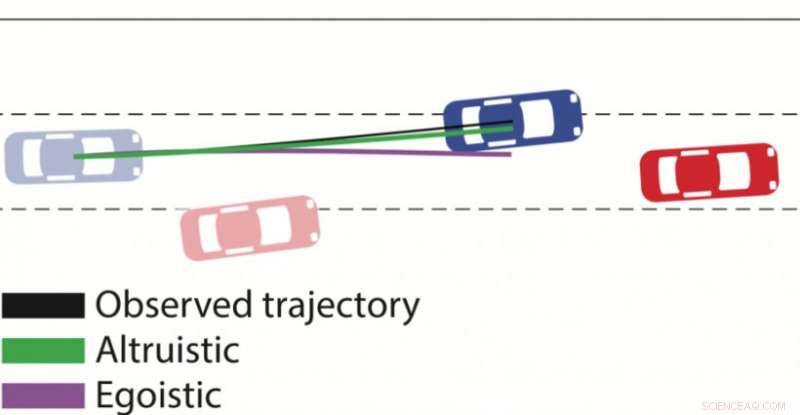
Dans les scénarios de fusion de voies, un système développé au MIT pourrait faire la distinction entre un comportement de conduite altruiste et égoïste. Crédit :Massachusetts Institute of Technology
Les voitures autonomes arrivent. Mais malgré tous leurs capteurs sophistiqués et leurs capacités complexes de traitement des données, même les voitures les plus avant-gardistes manquent de quelque chose que (presque) chaque jeune de 16 ans avec un permis d'apprenti a :la conscience sociale.
Alors que les technologies autonomes se sont considérablement améliorées, ils considèrent toujours finalement les conducteurs autour d'eux comme des obstacles constitués de uns et de zéros, plutôt que des êtres humains avec des intentions spécifiques, motivations, et personnalités.
Mais récemment, une équipe dirigée par des chercheurs du Laboratoire d'informatique et d'intelligence artificielle (CSAIL) du MIT a exploré si les voitures autonomes peuvent être programmées pour classer les personnalités sociales des autres conducteurs, afin qu'ils puissent mieux prédire ce que les différentes voitures feront et, donc, être en mesure de conduire plus prudemment parmi eux.
Dans un nouveau journal, les scientifiques ont intégré des outils de psychologie sociale pour classer le comportement de conduite en fonction de l'égoïsme ou de l'altruisme d'un conducteur particulier.
Spécifiquement, ils ont utilisé quelque chose appelé orientation vers la valeur sociale (SVO), qui représente le degré auquel quelqu'un est égoïste ("égoïste") par rapport à altruiste ou coopératif ("prosocial"). Le système estime ensuite les SVO des conducteurs pour créer des trajectoires de conduite en temps réel pour les voitures autonomes.
Tester leur algorithme sur les tâches de fusion de voies et de virages à gauche non protégés, l'équipe a montré qu'elle pouvait mieux prédire le comportement des autres voitures d'un facteur de 25 pour cent. Par exemple, dans les simulations de virage à gauche, leur voiture savait attendre quand la voiture qui approchait avait un conducteur plus égoïste, et ensuite faire le tour quand l'autre voiture était plus prosociale.
Bien qu'il ne soit pas encore assez robuste pour être mis en œuvre sur de vraies routes, le système pourrait avoir des cas d'utilisation intrigants, et pas seulement pour les voitures qui se conduisent elles-mêmes. Supposons que vous soyez un humain conduisant et qu'une voiture entre soudainement dans votre angle mort - le système pourrait vous avertir dans le rétroviseur que la voiture a un conducteur agressif, vous permettant de vous ajuster en conséquence. Cela pourrait également permettre aux voitures autonomes d'apprendre à présenter un comportement plus humain qui sera plus facile à comprendre pour les conducteurs humains.
"Travailler avec et autour des humains, c'est cerner leurs intentions pour mieux comprendre leurs comportements, " dit l'étudiant diplômé Wilko Schwarting, qui était l'auteur principal du nouvel article qui sera publié cette semaine dans le dernier numéro du Actes de l'Académie nationale des sciences . « Les tendances des gens à être collaboratives ou compétitives se répercutent souvent sur leur comportement en tant que conducteurs. Dans cet article, nous avons cherché à comprendre si c'était quelque chose que nous pouvions réellement quantifier."
Les co-auteurs de Schwarting comprennent les professeurs du MIT Sertac Karaman et Daniela Rus, ainsi que la chercheuse Alyssa Pierson et l'ancien postdoctorant du CSAIL Javier Alonso-Mora.
Un problème central avec les voitures autonomes d'aujourd'hui est qu'elles sont programmées pour supposer que tous les humains agissent de la même manière. Cela signifie que, entre autres, ils sont assez conservateurs dans leur prise de décision aux arrêts à quatre voies et à d'autres intersections.
Bien que cette prudence réduise le risque d'accidents mortels, cela crée également des goulots d'étranglement qui peuvent être frustrants pour les autres conducteurs, sans parler de leur difficulté à comprendre. (C'est peut-être la raison pour laquelle la majorité des incidents de circulation ont impliqué des conducteurs impatients.)
« Créer un comportement plus humain dans les véhicules autonomes (AV) est fondamental pour la sécurité des passagers et des véhicules environnants, puisque se comporter de manière prévisible permet aux humains de comprendre et de réagir de manière appropriée aux actions de l'AV, " dit Schwarting.
Pour essayer d'élargir la conscience sociale de la voiture, l'équipe CSAIL a combiné des méthodes issues de la psychologie sociale et de la théorie des jeux, un cadre théorique pour concevoir des situations sociales entre acteurs concurrents.
L'équipe a modélisé des scénarios routiers dans lesquels chaque conducteur a essayé de maximiser sa propre utilité et a analysé ses « meilleures réponses » compte tenu des décisions de tous les autres agents. Sur la base de ce petit extrait de mouvement d'autres voitures, l'algorithme de l'équipe pourrait alors prédire le comportement coopératif des voitures environnantes, altruiste, ou égoïste — regroupant les deux premiers comme « prosocial ». Les scores des personnes pour ces qualités reposent sur un continuum en ce qui concerne la mesure dans laquelle une personne démontre qu'elle se soucie d'elle-même par rapport aux autres.
Dans les scénarios de fusion et de virage à gauche, les deux options de résultat étaient soit de laisser quelqu'un se fondre dans votre voie ("prosocial") ou non ("égoïste"). Les résultats de l'équipe ont montré que, sans surprise, les voitures qui fusionnent sont jugées plus compétitives que les voitures qui ne fusionnent pas.
Le système a été formé pour essayer de mieux comprendre quand il est approprié d'afficher des comportements différents. Par exemple, même le plus respectueux des conducteurs humains sait que certains types d'actions, comme effectuer un changement de voie dans une circulation dense, nécessitent un moment d'affirmation et de détermination.
Pour la prochaine phase de la recherche, l'équipe prévoit de travailler pour appliquer leur modèle aux piétons, Vélos, et d'autres agents dans les environnements de conduite. En outre, ils étudieront d'autres systèmes robotiques agissant parmi les humains, tels que les robots ménagers, et intégrer SVO dans leurs algorithmes de prédiction et de prise de décision. Pierson dit que la capacité d'estimer les distributions SVO directement à partir du mouvement observé, plutôt que dans des conditions de laboratoire, sera important pour des domaines bien au-delà de la conduite autonome.
"En modélisant des personnalités de conduite et en intégrant mathématiquement les modèles à l'aide du SVO dans le module d'aide à la décision d'une voiture robot, ce travail ouvre la porte à un partage de la route plus sûr et plus fluide entre les voitures conduites par des humains et celles conduites par des robots, " dit Rus.
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.














