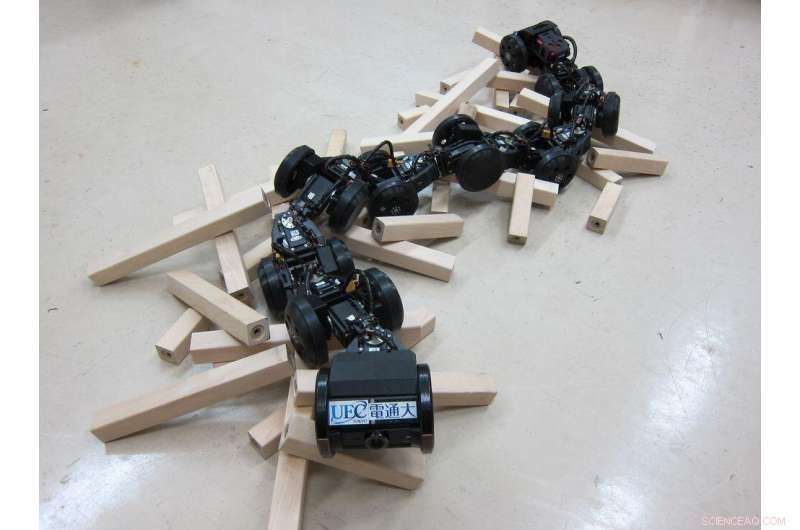
Le robot serpent T 2 Serpent-3. Crédit :Université d'électrocommunications
Les robots mobiles articulés ressemblant à des serpents peuvent pénétrer dans des espaces étroits et escalader des obstacles à l'aide de leurs corps longs et minces, et sont efficaces pour l'inspection des espaces étroits et les opérations de recherche et de sauvetage sur les sites sinistrés. Cependant, il est difficile de contrôler leurs mouvements précis car ils ont tellement d'actionneurs.
Maintenant, Motoyasu Tanaka et ses collègues de l'Université d'électrocommunications de Tokyo, proposer des méthodes de contrôle de robots serpentins pour un pilotage tridimensionnel, monter les escaliers et manipuler des objets, et ont développé le robot en forme de serpent T 2 Serpent-3. En pilotage tridimensionnel, le robot suit le terrain environnant en relaxant ses articulations, puis reprend pour quitter la posture du robot. L'opérateur peut facilement contrôler et déplacer le robot sur un terrain accidenté par cette méthode. Pour monter les escaliers, le robot déplace de manière autonome son mouvement dans les escaliers de la tête à la queue au moment approprié, car les données des capteurs attachés au bas du robot sont utilisées pour déclencher le mouvement. Pour manipuler un objet, la position et l'orientation de la pince fixée sur la tête du robot sont contrôlées en gardant la posture appropriée en sélectionnant de manière autonome l'affectation des roues levées/mises à la terre. Bien que le robot T 2 Snake-3 possède une trentaine d'actionneurs, l'opérateur peut facilement faire fonctionner le robot en utilisant ces méthodes et une manette de jeu.
Le robot T 2 Snake-3 est entré dans des espaces étroits, monter une marche d'un mètre de haut, monter des escaliers, et des vannes rotatives en utilisant les méthodes proposées. Le robot en forme de serpent a été contrôlé efficacement pour l'équipement d'inspection et l'intervention en cas de catastrophe.