Crédit :CC0 Domaine public
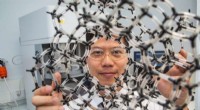
Sous le regard attentif de cinq caméras ultra-rapides, un petit, un oiseau bleu pâle nommé Gary attend le signal pour voler. Diane Chin, un étudiant diplômé de l'Université de Stanford et le formateur de Gary, pointe son doigt vers un perchoir à environ 20 pouces. Le hic, c'est que la perche est recouverte de téflon, le rendant apparemment impossible à saisir de manière stable.
L'atterrissage réussi de Gary sur le Teflon - et sur d'autres perchoirs de divers matériaux - enseigne aux chercheurs comment ils pourraient créer des machines qui atterrissent comme un oiseau.
"Les robots aériens modernes ont généralement besoin d'une piste ou d'une surface plane pour un décollage et un atterrissage faciles. Pour un oiseau, presque partout se trouve un point d'atterrissage potentiel, même dans les villes, " dit Chin, qui fait partie du labo de David Lentink, professeur adjoint de génie mécanique. "Nous voulions vraiment comprendre comment ils accomplissent cela et la dynamique et les forces qui sont impliquées."
Même les robots les plus avancés sont loin de la capacité de préhension des animaux lorsqu'ils traitent des objets de formes variées, tailles et textures. Donc, les chercheurs ont recueilli des données sur la façon dont Gary et deux autres oiseaux atterrissent sur différents types de surfaces, y compris une variété de perchoirs naturels et de perchoirs artificiels recouverts de mousse, papier de verre et téflon.
"Ce n'est pas sans rappeler demander à un gymnaste olympique d'atterrir sur des barres fixes recouvertes de téflon sans se colorer les mains, " dit Lentink, qui est l'auteur principal de l'article. Encore, les perroquets ont rendu ce qui semble presque impossible pour un regard humain sans effort.
Les recherches du groupe, publié le 6 août dans eLife , comprenait également des études détaillées de la friction produite par les griffes et les pattes des oiseaux. De ce travail, les chercheurs ont découvert que le secret de la polyvalence du perroquet se trouve dans la prise.
"Quand on regarde une personne qui court, un écureuil qui saute ou un oiseau qui vole, il est clair que nous avons un long chemin à parcourir avant que notre technologie puisse atteindre le potentiel complexe de ces animaux, tant en termes d'efficacité que d'athlétisme maîtrisé, " dit Guillaume Roderick, un étudiant diplômé en génie mécanique dans le laboratoire Lentink et le laboratoire de Mark Cutkosky, la chaire Fletcher Jones de la School of Engineering. "En étudiant des systèmes naturels qui ont évolué au cours de millions d'années, nous pouvons faire d'énormes progrès vers la construction de systèmes dotés de capacités sans précédent."
(Non)colle l'atterrissage
Les perchoirs dans cette recherche n'étaient pas votre stock moyen d'animalerie. Les chercheurs les ont séparés en deux, longitudinal, au point qui s'aligne approximativement avec le centre du pied d'un perroquet. En ce qui concerne l'oiseau, les perchoirs ressemblaient à une seule branche, mais chaque moitié reposait sur son propre capteur de force / couple à 6 axes. Cela signifiait que les chercheurs pouvaient capturer les forces totales exercées par l'oiseau sur le perchoir dans de nombreuses directions et comment ces forces différaient entre les moitiés, ce qui indiquait à quel point les oiseaux serraient fort.
Après que les oiseaux se soient battus vers les neuf perchoirs à détection de force de tailles assorties, douceur et glissant, le groupe a commencé à analyser les premières étapes de l'atterrissage. Comparer différentes surfaces de perchoirs, ils s'attendaient à voir des différences dans la façon dont les oiseaux s'approchaient du perchoir et la force avec laquelle ils atterrissaient, mais ce n'est pas ce qu'ils ont trouvé.
"Lorsque nous avons traité pour la première fois toutes nos données sur la vitesse d'approche et les forces au moment de l'atterrissage de l'oiseau, nous n'avons pas vu de différences évidentes, " se souvient Chin. " Mais ensuite nous avons commencé à examiner la cinématique des pieds et des griffes - les détails de la façon dont ils les déplaçaient - et nous avons découvert qu'ils les adaptaient pour coller à l'atterrissage. "
La mesure dans laquelle les oiseaux enroulaient leurs orteils et recourbaient leurs griffes variait en fonction de ce qu'ils rencontraient à l'atterrissage. Sur les surfaces rugueuses ou spongieuses, telles que la mousse de taille moyenne, papier de verre et perchoirs en bois brut - leurs pieds pourraient générer des forces de compression élevées avec peu d'aide de leurs griffes. Sur les perchoirs les plus difficiles à saisir, le bois de soie, Téflon et gros bouleau - les oiseaux recourbaient davantage leurs griffes, en les faisant glisser le long de la surface du perchoir jusqu'à ce qu'ils aient une assise sûre.
Cette adhérence variable suggère que, lors de la construction de robots pour atterrir sur une variété de surfaces, les chercheurs pourraient séparer le contrôle de l'approche de l'atterrissage des actions requises pour un atterrissage réussi.
Leurs mesures ont également montré que les oiseaux sont capables de repositionner leurs griffes d'une bosse ou d'un creux saisissable à l'autre en à peine 1 à 2 millisecondes. (En comparaison, il faut environ 100 à 400 millisecondes à un humain pour cligner des yeux.)
Oiseaux et robots
Les laboratoires Cutkosky et Lentink ont déjà commencé à caractériser comment les perroquets décollent des différentes surfaces. Combiné avec leurs travaux précédents explorant comment les perroquets naviguent dans leur environnement, le groupe espère que les résultats pourront conduire à des robots volants plus agiles.
"Si nous pouvons appliquer tout ce que nous apprenons, nous pouvons développer des robots bimodaux qui peuvent effectuer une transition vers et depuis l'air dans un large éventail d'environnements différents et augmenter la polyvalence des robots aériens que nous avons aujourd'hui, " dit Chin.
Vers cette fin, Roderick travaille à la conception de mécanismes qui imiteraient la forme et la physique de préhension des oiseaux.
"Une application de ce travail qui m'intéresse est d'avoir des robots perchés qui peuvent agir comme une équipe de minuscules petits scientifiques qui font des enregistrements, de façon autonome, pour des recherches sur le terrain en forêt ou en jungle, " Roderick a déclaré. " J'aime vraiment puiser dans les principes fondamentaux de l'ingénierie et les appliquer à de nouveaux domaines pour repousser les limites de ce qui a déjà été réalisé et de ce qui est connu. "