Le sens du toucher est généralement mesuré par un capteur qui peut traduire une pression sur lui en un petit signal électrique. Crédit :Shutterstock
Nous avons des robots qui peuvent marcher, voir, parler et entendre, et manipuler des objets dans leurs mains robotiques. Il y a même un robot qui peut sentir.
Mais qu'en est-il du toucher ? C'est plus facile à dire qu'à faire et il y a des limites à certaines des méthodes actuelles examinées, mais nous développons une nouvelle technique qui peut surmonter certains de ces problèmes.
Pour les humains, le toucher joue un rôle vital lorsque nous bougeons notre corps. Toucher, combiné avec la vue, est crucial pour des tâches telles que ramasser des objets - durs ou mous, léger ou lourd, chaud ou froid, sans les endommager.
Dans le domaine de la manipulation robotique, dans lequel une main de robot ou une pince doit saisir un objet, l'ajout du sens du toucher pourrait éliminer les incertitudes dans le traitement du doux, objets fragiles et déformables.
La quête d'une peau intelligente
Quantifier le toucher en termes d'ingénierie ne nécessite pas seulement la connaissance précise de la quantité de force externe appliquée à un capteur tactile, mais il faut aussi connaître la position exacte de la force, son angle, et comment il va interagir avec l'objet manipulé.
Ensuite, il y a la question de savoir combien de ces capteurs un robot aurait besoin. Développer une peau de robot qui pourrait contenir des centaines voire des milliers de capteurs tactiles est une tâche d'ingénierie difficile.
Comprendre les mécanismes physiques de la détection tactile dans le monde biologique fournit de grandes informations lorsqu'il s'agit de concevoir l'équivalent robotique, une peau intelligente.
Mais une barrière importante pour le développement de la peau intelligente est l'électronique requise.
Mesure quotidienne de la force et du toucher
Le sens du toucher est généralement mesuré par un capteur qui peut traduire la pression en un petit signal électrique. Lorsque vous utilisez une balance numérique pour vous peser ou mesurer des ingrédients dans votre cuisine, la balance utilise probablement un transducteur piézoélectrique.
C'est un appareil qui transforme une force en électricité. Le minuscule courant électrique du transducteur est ensuite acheminé à travers des fils jusqu'à une petite puce qui lit la force du courant, convertit cela en une mesure de poids significative, et l'affiche sur un écran.
Bien qu'il soit capable de ressentir différents niveaux de force, ces appareils électroniques ont plusieurs limitations qui les rendent impraticables pour une peau intelligente. En particulier, ils ont un temps de réponse relativement lent à la force.
Il existe d'autres types de capteurs tactiles basés sur un matériau changeant ses autres caractéristiques électriques, comme la capacité ou la résistance. L'écran de votre téléphone portable peut avoir cette technologie intégrée, et si vous utilisez un trackpad sur votre ordinateur, il utilisera certainement des capteurs tactiles.
Détection de force souple et flexible
De grands progrès ont été réalisés ces dernières années dans la fabrication de capteurs tactiles pouvant être intégrés dans des matériaux souples et flexibles. C'est exactement ce dont nous avons besoin pour une peau intelligente.
Mais beaucoup de ces développements échouent complètement (en raison du type de détection) en présence d'humidité. (Avez-vous déjà essayé un doigt mouillé sur l'écran tactile de votre téléphone intelligent ?)
Les applications médicales sont désormais l'un des principaux moteurs de la demande de capteurs de force flexibles et robustes. Par exemple, smart skin pourrait être utilisé pour restaurer la rétroaction sensorielle chez les patients présentant des lésions cutanées ou une neuropathie périphérique (engourdissement ou picotements). Il pourrait également être utilisé pour donner aux mains prothétiques une capacité de détection tactile de base.
Récemment, des chercheurs du MIT et de Harvard ont développé un gant tactile évolutif et l'ont associé à l'intelligence artificielle. Des capteurs uniformément répartis sur la main peuvent être utilisés pour identifier des objets individuels, estimer leur poids, et explorez les motifs tactiles typiques qui émergent en les saisissant.
Les chercheurs ont créé un gant avec 548 capteurs assemblés sur un tricot contenant un film piézorésistif (qui réagit également à la pression ou à la contrainte) relié par un réseau d'électrodes à fils conducteurs.
Il s'agit de la première tentative réussie d'enregistrement de tels signaux à grande échelle, révélant des informations importantes qui peuvent être utilisées dans la conception future de prothèses et d'outils de préhension de robots.
Mais comme presque toutes les autres interfaces tactiles conçues avec des capacités capacitives, techniques résistives ou piézoélectriques, cette technologie tactile ne fonctionne pas bien avec les doigts mouillés ou sous l'eau.
Détection de force optique à l'horizon
Pour résoudre ce problème, nous avons développé une nouvelle forme de capteur tactile qui utilise des films nanométriques de LED organiques (OLED) et de photodiodes organiques (OPD) pour mesurer le toucher doux.
La technologie OLED se trouve normalement dans les écrans de télévision et de smartphone. Notre approche pour mesurer le sens du toucher est basée sur la détection de force optique.
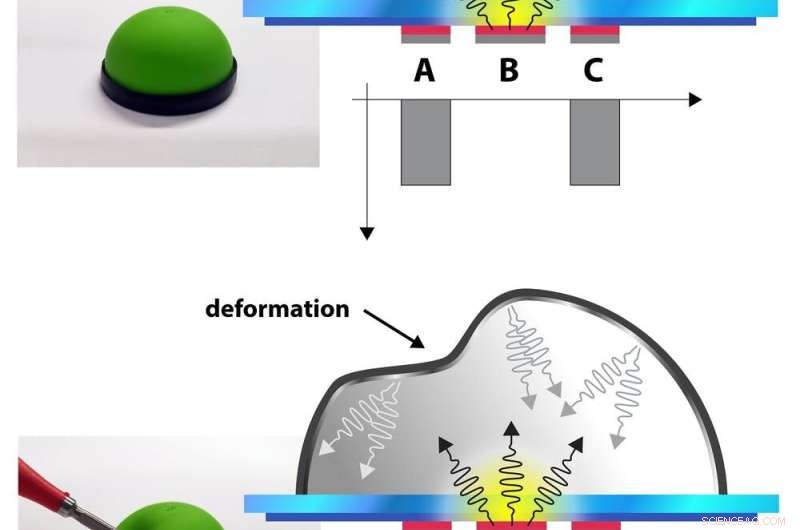
Un élément tactile unique composé d'un dôme sur quelques pixels OLED. Sommet, lorsque rien ne touche le dôme, une quantité égale de lumière est réfléchie par le pixel émetteur de lumière B, aux pixels de détection de lumière A et C. En bas, quand quelque chose touche le dôme, il est déformé et la quantité de lumière réfléchie change entre les pixels A et C. Crédit :Ajay Pandey, Auteur fourni
Les éléments OLED (appelés diodes ou pixels) sont en fait entièrement réversibles. Cela signifie qu'en plus de pouvoir produire de la lumière (comme dans un écran de télévision), ces pixels peuvent également détecter la lumière.
En utilisant ce principe, nous pouvons fabriquer un minuscule, opaque, dôme flexible avec un revêtement réfléchissant qui est placé au-dessus de certains pixels OLED. La lumière émise par le pixel central est uniformément répartie sur tous les autres pixels sous le dôme si le dôme n'est pas perturbé.
Mais si le dôme est enfoncé - en touchant quelque chose - il se déformera, résultant en une réponse inégale des pixels utilisés pour détecter la lumière réfléchie. En combinant les réponses de dizaines de ces dômes dans la zone de contact, il sera possible d'estimer la force appliquée.
Cette approche est une étape importante vers la simplification de la disposition de la peau intelligente pour les applications de grande surface et nous espérons que nous verrons bientôt des robots capables de détecter tout le corps dans l'air, lorsqu'il est mouillé ou même sous l'eau.
Cet article est republié à partir de The Conversation sous une licence Creative Commons. Lire l'article original.