Crédit :MIT
Il y a des années, Le professeur du MIT Neil Gershenfeld a eu une pensée audacieuse. Frappé par le fait que tous les êtres vivants du monde sont construits à partir de combinaisons de seulement 20 acides aminés, il s'est demandé :Serait-il possible de créer un kit de seulement 20 pièces fondamentales qui pourraient être utilisées pour assembler tous les différents produits technologiques dans le monde ?
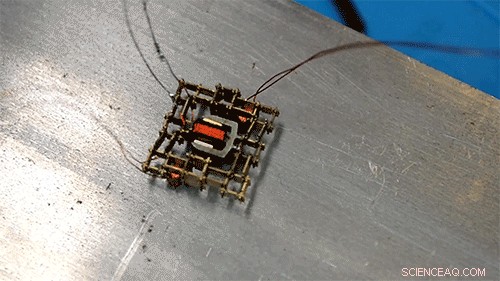
Gershenfeld et ses étudiants ont depuis fait des progrès constants dans cette direction. Leur dernière réalisation, présenté cette semaine lors d'une conférence internationale sur la robotique, se compose d'un ensemble de cinq petites pièces fondamentales qui peuvent être assemblées dans une grande variété de dispositifs fonctionnels, y compris un petit moteur « marche » qui peut se déplacer d'avant en arrière sur une surface ou faire tourner les engrenages d'une machine.
Précédemment, Gershenfeld et ses étudiants ont montré que les structures assemblées à partir de nombreux petits, des sous-unités identiques peuvent avoir de nombreuses propriétés mécaniques. Prochain, ils ont démontré qu'une combinaison de types de pièces rigides et flexibles peut être utilisée pour créer des ailes d'avion morphing, un objectif de longue date en ingénierie aérospatiale. Leur dernier travail ajoute des composants pour le mouvement et la logique, et sera présenté à la Conférence internationale sur la manipulation, Automatisation et robotique à petite échelle (MARSS) à Helsinki, Finlande, dans un article de Gershenfeld et Will Langford, étudiant diplômé du MIT.
Leurs travaux offrent une alternative aux approches actuelles de construction de robots, qui appartiennent en grande partie à l'un des deux types suivants :des machines personnalisées qui fonctionnent bien mais sont relativement chères et rigides, et reconfigurables qui sacrifient les performances pour la polyvalence. Dans la nouvelle approche, Langford a proposé un ensemble de composants à l'échelle de cinq millimètres, tous pouvant être reliés les uns aux autres par un connecteur standard. Ces pièces comprennent les précédents types rigides et flexibles, ainsi que des pièces électromagnétiques, une bobine, et un aimant. À l'avenir, l'équipe prévoit de les fabriquer à partir de types de pièces de base encore plus petits.
Crédit :MIT
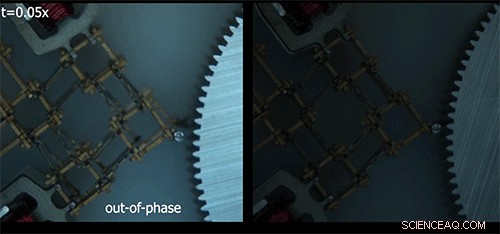
En utilisant ce simple kit de petites pièces, Langford les a assemblés dans un nouveau type de moteur qui déplace un appendice par étapes mécaniques discrètes, qui peut être utilisé pour faire tourner une roue dentée, et une forme mobile du moteur qui transforme ces pas en locomotion, lui permettant de "marcher" sur une surface d'une manière qui rappelle les moteurs moléculaires qui déplacent les muscles. Ces pièces pourraient également être assemblées en mains pour la préhension, ou des jambes pour marcher, au besoin pour une tâche particulière, puis remonté plus tard au fur et à mesure que ces besoins changent. Gershenfeld les qualifie de « matériaux numériques, " des pièces discrètes pouvant être assemblées de manière réversible, formant une sorte de micro-LEGO fonctionnel.
Le nouveau système est une étape importante vers la création d'un kit standardisé de pièces pouvant être utilisé pour assembler des robots dotés de capacités spécifiques adaptées à une tâche particulière ou à un ensemble de tâches. Ces robots spécialement conçus pourraient ensuite être démontés et remontés selon les besoins sous diverses formes, sans avoir besoin de concevoir et de fabriquer de nouveaux robots à partir de zéro pour chaque application.
Le moteur initial de Langford a une capacité semblable à celle d'une fourmi à soulever sept fois son propre poids. Mais si des forces plus importantes sont nécessaires, beaucoup de ces pièces peuvent être ajoutées pour donner plus de punch. Ou si le robot doit se déplacer de manière plus complexe, ces pièces pourraient être réparties dans toute la structure. La taille des blocs de construction peut être choisie pour correspondre à leur application; l'équipe a fabriqué des pièces de taille nanométrique pour fabriquer des nanorobots, et des pièces de la taille d'un mètre pour fabriquer des mégarobots. Précédemment, des techniques spécialisées étaient nécessaires à chacun de ces extrêmes d'échelle de longueur.
"Une application émergente consiste à fabriquer de minuscules robots capables de travailler dans des espaces confinés, " dit Gershenfeld. Certains des appareils assemblés dans ce projet, par exemple, sont plus petits qu'un centime mais peuvent effectuer des tâches utiles.














