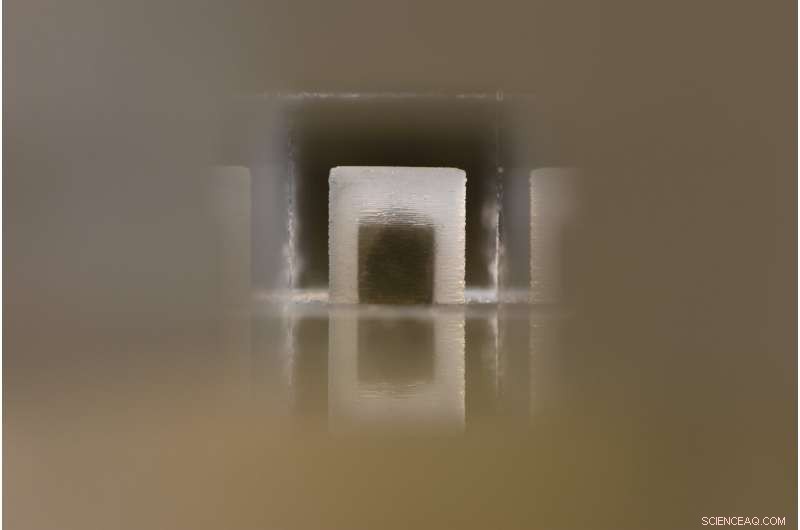
La cupule (zone claire) dans le canal acrylique utilisé pour les tests expérimentaux. À l'intérieur de la cupule se trouvent des plaques de gallium-indium en métal liquide (zone sombre). Crédit :Laboratoire de recherche naval des États-Unis.
La nature peut être une source d'inspiration précieuse pour les chercheurs qui développent des robots et des systèmes d'intelligence artificielle (IA). Etudes en robotique submersible, par exemple, ont souvent tenté de reproduire ou d'incorporer des mécanismes observés dans la vie aquatique, tels que les motifs de locomotion des poissons et les textures de peau de requin.
Une équipe de chercheurs du U.S. Naval Research Laboratory et du U.S. Naval Undersea Warfare Center ont récemment développé une cupule capacitive à détection de flux inspirée des neuromastes superficiels, qui sont essentiellement des structures sur le corps des poissons et des amphibiens qui peuvent détecter l'écoulement de l'eau. Cette cupule, présenté dans un article publié dans MDPI, présente une sensibilité élevée de 0,05 picofarad par millimètre (pF/mm) et pourrait être appliquée à une variété de robots et de véhicules conçus pour être déployés sous l'eau.
"Le laboratoire de recherche naval des États-Unis, avec de nombreuses autres institutions, explore des moyens inspirés par la nature pour accroître l'efficacité et la maniabilité des robots sous-marins, " Charles Rohde, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « En substance, la création d'un poisson artificiel offre de nombreux avantages par rapport aux conceptions traditionnelles à hélice. Si nous regardons les contreparties biologiques, bien que, nous voyons que leur succès est dû à plus que juste la mécanique et le mouvement du corps; les poissons ont des réseaux de capteurs le long de leur corps."
Les poissons ont une série de capteurs dits de ligne latérale qui fournissent une rétroaction sur l'état du débit, leur permettant de s'orienter sous l'eau et de détecter les objets à proximité. Rohde et ses collègues voulaient reproduire ces capteurs et imiter leurs propriétés pour améliorer les performances des véhicules sous-marins.
Les cupules biologiques observées chez les poissons sont constituées de gel incrusté de poils capteurs, qui sont attachés au cerveau de l'animal aquatique via une série de nerfs. La cupule artificielle mise au point par les chercheurs, d'autre part, est composé de caoutchouc de silicone incrusté de plaques de détection de métal liquide, qui sont attachés à un microcontrôleur à l'aide de fils.
Une autre différence entre les cupules naturelles et les cupules artificielles développées par les chercheurs est que si la première utilise des signaux électrochimiques, ce dernier est capacitif (c'est-à-dire comme les écrans tactiles des smartphones, il repose sur des changements de champs électriques). Contrairement aux écrans tactiles, le dispositif bio-inspiré n'interagit pas avec des objets externes (par exemple des doigts humains). Au lieu, il est constitué de plaques de métal liquide se déplaçant et se déformant les unes par rapport aux autres.
"Les plaques de métal liquide (gallium-indium) forment deux capteurs capacitifs qui se déforment en fonction des forces transmises à la cupule en silicone par l'écoulement du fluide, " James Wissman, un autre chercheur impliqué dans l'étude, expliqué. "Comme la cupule se déforme, les plaques de métal liquide à l'intérieur se rapprochent ou s'éloignent les unes des autres, changer la capacité entre eux. Un microcontrôleur enregistre ce changement de capacité, qui peut être lié au débit de fluide extérieur par l'expérimentation et la modélisation mathématique.
Les capteurs capacitifs développés par les chercheurs ont une sensibilité élevée et peuvent également être disposés en matrices. Par exemple, des dizaines de ces capteurs pourraient être disposés en travers d'un robot sous-marin en ligne latérale, afin de capturer et de suivre les caractéristiques du débit d'eau. Ces cupules de détection sont molles; ainsi, ils peuvent être intégrés à des matériaux de peau artificielle sans ajouter de rigidité aux machines bio-inspirées.

Échantillon de cupule montrant sa flexibilité. Crédit :Laboratoire de recherche naval des États-Unis.
"Il existe plusieurs autres capteurs de débit à base de cupules et de cheveux publiés dans la littérature, mais nous avons été surpris de n'en trouver qu'un seul sous l'eau, exemple inspiré des moustaches de phoque de nature capacitive, " a déclaré Rohde. " Nos résultats montrent que la détection capacitive est une approche très prometteuse, et nous espérons que notre publication encouragera d'autres à explorer cette méthode."
Rohde, Wissman et leurs collègues ont fabriqué leur capteur bio-inspiré en utilisant des techniques d'injection de cire perdue et sous vide. Ils ont ensuite effectué une série de tests préliminaires pour évaluer ses performances.
Par rapport à d'autres appareils capacitifs, leur capteur intègre des transducteurs dans la cupule elle-même, plutôt qu'à sa base. Dans leurs évaluations, cet aspect particulier de la fabrication du capteur s'est avéré très efficace, conduisant à des capacités de détection plus avancées que celles observées dans les dispositifs capacitifs développés précédemment.
"A part le capteur lui-même, un autre aspect important est le processus de fabrication, " a déclaré Wissman. " Pour créer une structure aussi complexe à l'intérieur d'une petite structure en silicone, nous avons utilisé une combinaison unique de moulage sacrificiel (pensez au moulage à la cire perdue) et d'injection sous vide de métal liquide. Cela pourrait facilement être étendu à d'autres appareils, tels qu'un câblage 3-D complexe ou des antennes."
Le dispositif de détection développé par Rohde, Wissman et ses collègues pourraient avoir une grande variété d'applications dans le domaine de la robotique submersible, car il permet le développement de robots capables de naviguer plus efficacement dans les environnements sous-marins. Dans leurs futurs travaux, les chercheurs envisagent de miniaturiser leur appareil, qui mesure actuellement 5 mm de haut; 50 fois plus gros que les neuromastes observés chez les poissons.
Une version plus petite du capteur pourrait permettre une mesure plus directe des conditions d'écoulement de la couche limite, encore plus près de la surface d'un robot faisant face à l'eau. Afin de miniaturiser le capteur, cependant, les chercheurs devront changer leurs méthodes de fabrication.
Jusque là, Wissman et ses collègues se sont principalement concentrés sur les débits d'eau stables (ou changeant lentement), mais des variations de débit ultrarapides (c'est-à-dire> 1, 000-10, 000 fois par seconde) associés aux turbulences et aux tourbillons pourraient fournir des informations plus approfondies sur l'environnement d'un robot. Dans leurs prochaines études, les chercheurs souhaitent donc élargir le champ de leurs travaux en intégrant ces variations de flux et en s'intéressant à des techniques d'acquisition de données plus rapides.
"Nous prévoyons également d'assembler un ensemble de cupules artificielles - une ligne latérale artificielle - qui peuvent être attachées à un robot submersible, " Wissman a déclaré. "Le point culminant de ce projet serait d'observer un poisson robotique autonome, à l'aide de nos capteurs embarqués, naviguer avec succès dans une piscine avec des obstacles et des courants."
© 2019 Réseau Science X