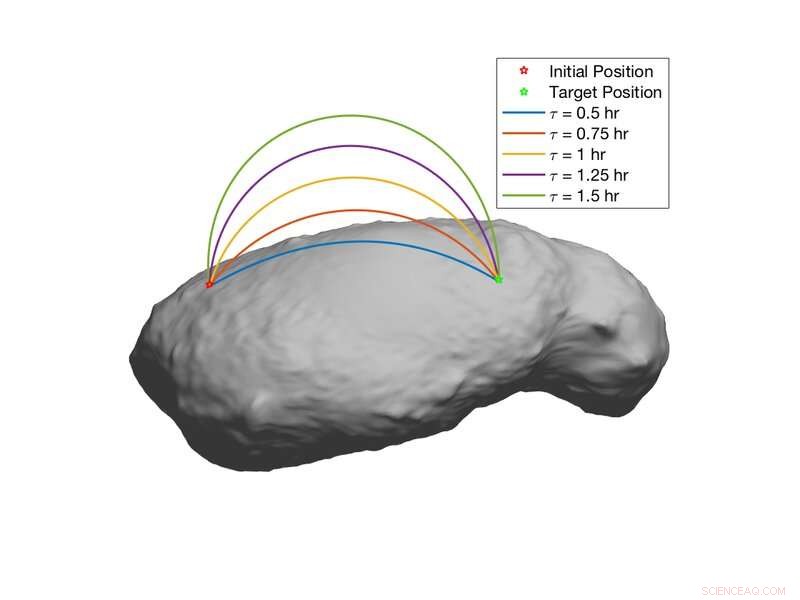
Trajectoires de saut de l'emplacement initial à un emplacement cible à la surface d'Itokawa. Crédit :Kalita &Thangavelautham.
Les astéroïdes sont petits, corps rocheux en orbite autour du soleil qui sont trop petits pour être appelés planètes. Il y a des millions d'astéroïdes dans le système solaire, de taille variable, forme et composition. L'exploration des astéroïdes pourrait aider à découvrir des informations fascinantes sur l'origine du système solaire, de la planète Terre, et de la vie elle-même.
Les astéroïdes pourraient également servir de points stratégiques pour la science planétaire, l'exploitation des ressources, relais de communication ou défense planétaire. Jusque là, cependant, l'exploration de la surface des astéroïdes s'est avérée très difficile en raison de leur champ de gravité faible et hautement non linéaire.
Missions récentes d'astéroïdes, telles que Hayabusa II et OSIRIS-Rex étaient simplement des opérations de survol ou de toucher-départ. Les chercheurs ont ainsi essayé de développer une technologie qui permettrait l'exploration de surfaces d'astéroïdes, par exemple, à l'aide d'instruments in situ pour analyser leur composition et les matériaux souterrains.
Les robots sauteurs pourraient être particulièrement utiles pour l'exploration de telles surfaces, car la mobilité par saut balistique présente plusieurs avantages en présence de champs de gravité irréguliers. Ces types de robots peuvent parcourir de grandes distances sur un terrain accidenté, avec une dépense énergétique limitée. Une équipe de chercheurs de l'Université de l'Arizona a récemment développé une dynamique de saut balistique et une nouvelle approche pour la planification de mouvement sur les surfaces d'astéroïdes.
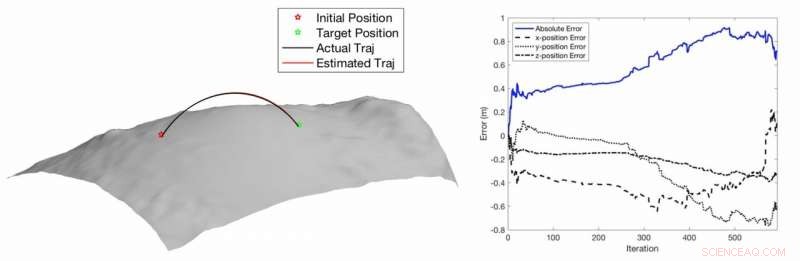
Auto-localisation à l'aide de la correspondance de balayage de nuage de points 3D. Crédit :Kalita &Thangavelautham.
"Contrairement à la Terre, la gravité des astéroïdes est faible, en tant que tels, les rovers sauteurs sont plus adaptés, car ils peuvent parcourir de grandes distances sur un terrain arbitrairement accidenté avec une faible dépense d'énergie, " Himangshu Kalita, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Toutefois, leur forme irrégulière se traduit par un champ de gravité très irrégulier, ce qui rend le saut très incertain. Ainsi, une architecture séquentielle pour l'autonomie du rover de saut est requise qui peut planifier à l'avance avant d'exécuter n'importe quel saut et se localiser simultanément."
L'approche imaginée par Kalita et son collègue Jekan Thanga calcule la vitesse nécessaire pour intercepter une cible puis localise le robot sauteur. Pour localiser le robot, les chercheurs ont utilisé des méthodes d'estimation de pose basées sur l'appariement de balayages successifs à l'aide d'un scanner laser 3D.
Les informations recueillies sont ensuite utilisées pour planifier le mouvement du robot sauteur sur la surface de l'astéroïde cible. Le robot devrait effectuer plusieurs sauts pour atteindre un emplacement souhaité sur l'astéroïde, tout en évitant les obstacles.
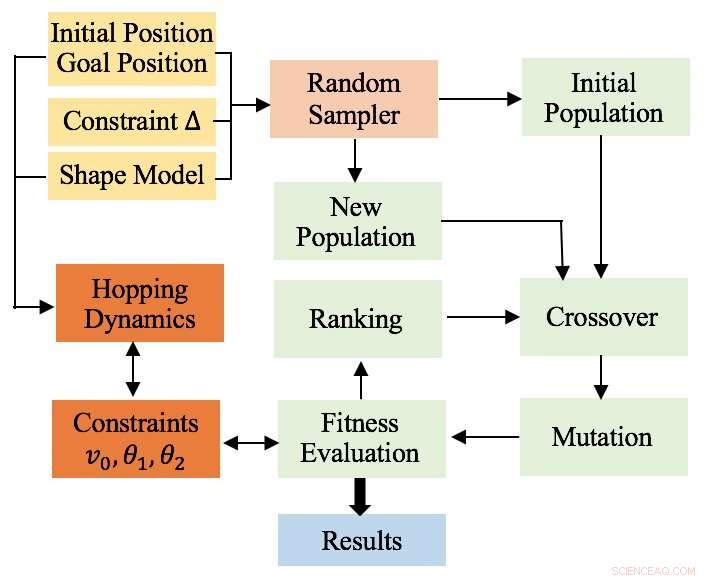
Schéma du planificateur de chemin optimisé à l'aide d'un algorithme évolutif. Crédit :Kalita &Thangavelautham.
"L'architecture de planification de mouvement discutée dans l'article peut trouver des trajectoires presque optimales pour qu'un rover sautillant atteigne un emplacement cible à partir de son emplacement initial à la surface d'un astéroïde avec des champs de gravité irréguliers, " a expliqué Kalita. " Notre approche utilise un modèle dynamique de haute fidélité pour effectuer une évaluation par essais et erreurs dans la simulation des manœuvres candidates afin de déterminer leur adéquation. L'évaluation par essais et erreurs prend en compte le risque, récompenses et incertitudes locales."
De nombreux astéroïdes sont riches en ressources telles que l'eau, composés de carbone, métaux du groupe du fer et du platine. Certains astéroïdes contiennent également des restes de planètes existantes et pourraient ainsi servir de « capsules temporelles », fournissant des enregistrements vierges de la géologie primitive et de la géohistoire de ces planètes. L'exploration de ces astéroïdes pourrait offrir un aperçu précieux de l'origine du système solaire et des planètes qu'il contient. À l'avenir, l'approche imaginée par Thanga et Kalita pourrait ouvrir la voie à l'exploration de surfaces d'astéroïdes, menant à des observations et des découvertes intéressantes.
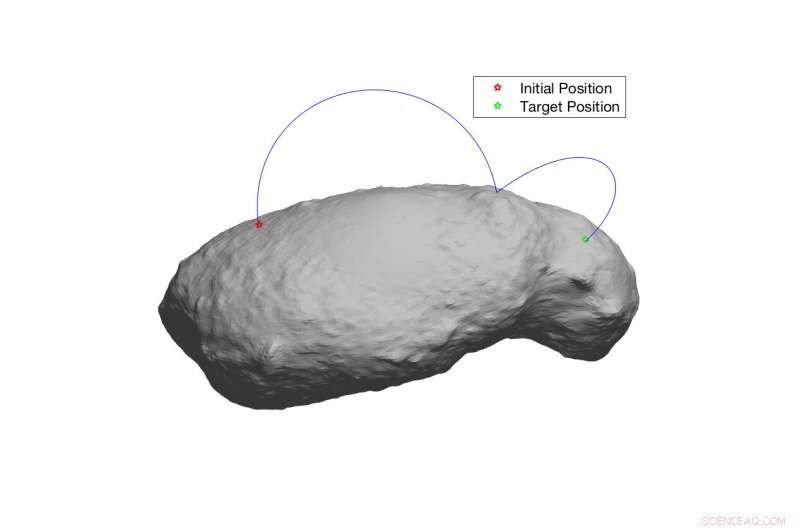
Trajectoire optimale générée par le planificateur de chemin pour atteindre un emplacement cible. Crédit :Kalita &Thangavelautham.
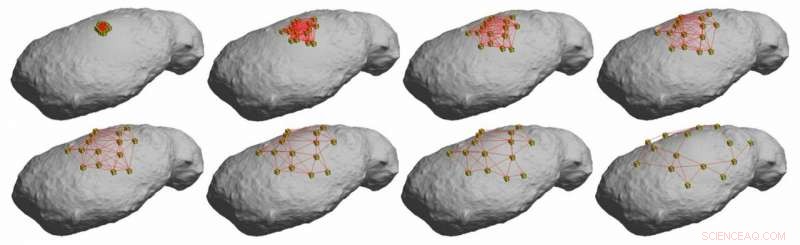
Plusieurs rovers explorant la surface de l'astéroïde Itokawa en coopération. Crédit :Kalita &Thangavelautham.
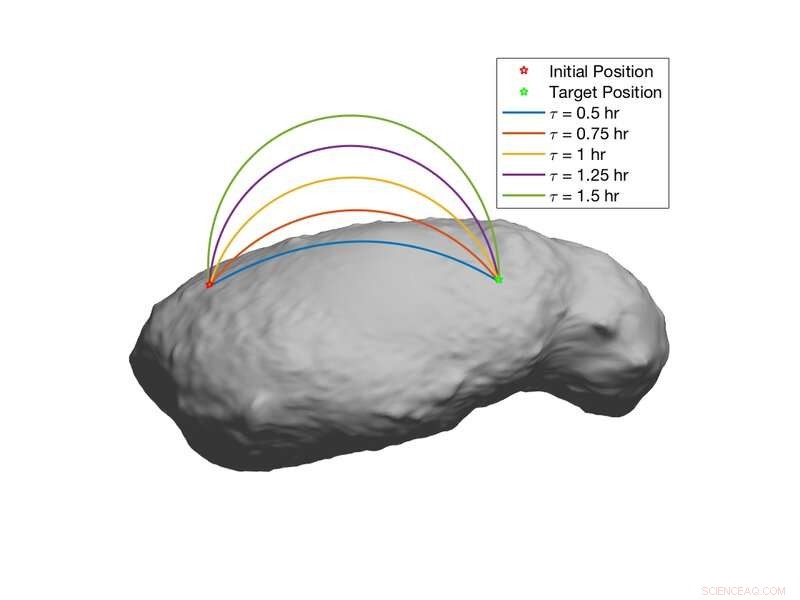
Trajectoires de saut de l'emplacement initial à un emplacement cible à la surface d'Itokawa. Crédit :Kalita &Thangavelautham.
"Le survol et l'observation à longue distance des astéroïdes sont insuffisants pour déterminer ce qui se trouve sous la couche supérieure des astéroïdes, " a dit Thanga. " Notre approche, qui consiste à effectuer des sauts balistiques pour l'exploration de surface d'astéroïdes, peut répondre à ces questions. De plus, les rovers déployés sur les surfaces des astéroïdes à ce jour s'appuient sur un vaisseau-mère pour la localisation, mais leur rencontre est peu fréquente. Nos simulations montrent qu'en utilisant un capteur de cartographie 3D à bord, les rovers peuvent effectuer une auto-localisation indépendante du vaisseau-mère, ce qui est un précurseur de l'autonomie des rover."
L'approche imaginée par Thanga et Kalita est conçue pour planifier efficacement le mouvement d'un robot sauteur sur de longues distances, sur des surfaces d'astéroïdes avec des champs de gravité irréguliers. La même approche pourrait être appliquée à plusieurs robots coordonnés qui explorent simultanément la surface d'un astéroïde donné. Les chercheurs ont également étendu leur méthode afin de calculer plusieurs trajectoires optimales, qui permettrait à un robot d'atteindre un objectif souhaité tout en visitant plusieurs points de cheminement.
« Nous sommes maintenant en train de développer des prototypes de rover sauteur miniaturisé qui utiliseront des propulseurs à base de sublimé pour sauter, " a déclaré Kalita. "Avec des champs de gravité irréguliers simulés, nous pourrons tester notre approche pour trouver des trajectoires de saut."
© 2019 Réseau Science X