Le véhicule sous-marin autonome DEPTHX Photo © Stone Aerospace/PSC, Inc.
Le véhicule sous-marin autonome DEPTHX Photo © Stone Aerospace/PSC, Inc. De quoi auriez-vous besoin pour explorer un océan sur Europa, l'une des lunes de Jupiter ? C'est à des centaines de millions de kilomètres, et l'océan se trouve sous une couche de glace d'au moins 10 kilomètres (6 miles) d'épaisseur. Vous auriez probablement besoin d'un vaisseau spatial pour atterrir sur la glace, un moyen de percer la glace, et un véhicule submersible pour explorer l'océan et rapporter les découvertes à la Terre.
Ce véhicule submersible est un projet occupant les efforts du Dr Bill Stone, PDG de Stone Aerospace à Austin, Texas. Stone et ses collègues ont développé un prototype véhicule sous-marin autonome (AUV) appelé Explorateur thermique phréatique profond (DEPTHX) pour l'exploration à distance et le testent actuellement dans une grande grotte sous-marine. Dans cet article, nous allons examiner cet AUV révolutionnaire, sa mission et comment il s'intègre dans le schéma plus large de l'exploration extraterrestre.
Le projet DEPTHX fait partie d'une série financée par la NASA pour développer des sondes robotiques capables d'explorer Europa (nous expliquerons pourquoi Europa est une cible si intéressante plus tard). Stone Aerospace conçu, construit et exploite DEPTHX en collaboration avec ses partenaires :
 DEPTHX sur le pont lors d'un de ses tests Photo © Stone Aerospace/PSC, Inc.
DEPTHX sur le pont lors d'un de ses tests Photo © Stone Aerospace/PSC, Inc. Le projet DEPTHX est conçu pour répondre à ces questions :
DEPTH X a terminé les tests en cuve (qui incluent l'intégration des systèmes et la cartographie) et se prépare maintenant à subir des tests dans un environnement totalement inconnu :le Zacatón au Mexique cenote .
Prochain, examinons de plus près l'AUV et ses systèmes.
Cénotes
Les cénotes (prononcé "say-NO-tay") sont de grands gouffres d'eau douce trouvés dans la péninsule du Yucután au Mexique. Ces cenotes se sont formés lorsque l'eau souterraine s'est gravée dans le poreux calcaire substrat rocheux qui compose toute la péninsule. Le cénote de Zacáton est l'un des cinq cénotes connectés et est considéré comme le plus profond du monde. Zacáton dispose également d'un source hydrothermale à l'intérieur.
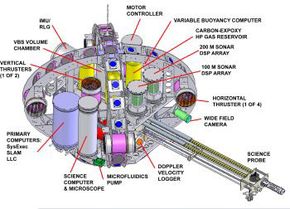 Structures internes DEPTHX Image © Stone Aerospace/PSC, Inc.
Structures internes DEPTHX Image © Stone Aerospace/PSC, Inc. Le DEPTHX AUV est de forme ovoïde, avec un grand axe de 4,26 mètres (13,97 pieds), un axe court de 3,04 m (9,97 ft), et un poids de 1,3 tonne métrique (1,43 tonne courte). Il peut se déplacer librement, survoler et rail mural en trois dimensions sans aucune commande externe. DEPTHX a une vitesse de croisière minimale de 0,2 mètre par seconde (0,65 pied par seconde) pour la cartographie et peut aller jusqu'à 1, 000 m (3, 280 pieds). Pour fonctionner de manière autonome, DEPTHX doit être capable de faire ce qui suit :
 Gros plan sur un propulseur DEPTHX Image © Stone Aerospace/PSC, Inc.
Gros plan sur un propulseur DEPTHX Image © Stone Aerospace/PSC, Inc. DEPTHX dispose de six propulseurs (quatre horizontaux et deux verticaux), qui lui permettent de manœuvrer en trois dimensions. Le véhicule peut être manœuvré avec seulement deux des propulseurs horizontaux et un des propulseurs verticaux - les extras sont pour la sauvegarde.
DEPTHX peut également survoler. Pour tenir sa position, il pourrait utiliser les propulseurs, mais cela consommerait rapidement une énergie précieuse de la batterie. Au lieu, le véhicule est équipé de deux moteurs à flottabilité variable (VBE) . Un ordinateur VBE détecte la pression, température et salinité (teneur en sel) de l'eau environnante et calcule la flottabilité de l'embarcation. L'ordinateur ouvre ou ferme ensuite les vannes qui permettent aux pompes ou au gaz sous pression de laisser entrer ou sortir l'eau. Comme pour les propulseurs, il y a une redondance intégrée et le DEPTHX peut survoler en utilisant un seul VBE.
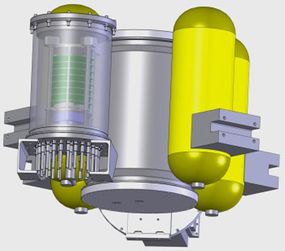 Les moteurs à flottabilité variable permettent à DEPTHX de planer. Image © Stone Aerospace/PSC, Inc.
Les moteurs à flottabilité variable permettent à DEPTHX de planer. Image © Stone Aerospace/PSC, Inc. 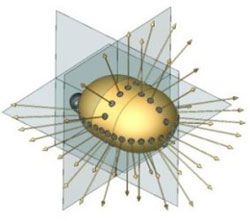 Réseau géométrique de la capacité du capteur sonar DEPTHX Image © Stone Aerospace/PSC, Inc.
Réseau géométrique de la capacité du capteur sonar DEPTHX Image © Stone Aerospace/PSC, Inc. DEPTHX dispose de 54 capteurs sonar espacés autour de son châssis et contrôlés par deux réseaux de sonars . Le sonar utilise des impulsions d'ondes sonores à haute énergie et leurs réflexions pour localiser des objets dans un rayon de 250 à 300 mètres du véhicule. Les informations qu'il recueille sont transmises aux ordinateurs de bord pour le contrôle de la navigation.
En plus du sonar, DEPTHX navigue à l'aide d'accéléromètres, jauges de profondeur et une centrale inertielle. Un enregistreur de vitesse Doppler détermine la vitesse à laquelle le véhicule se déplace et transmet cette information à l'ordinateur principal, qui ajuste la vitesse du véhicule.
Au fur et à mesure que DEPTHX se déplace, les ordinateurs utilisent les informations du sonar pour créer des images 3D, qui sont superposés dans la mémoire de l'ordinateur pour faire une carte géométrique progressive. La technique s'appelle Localisation et cartographie simultanées (SLAM) . Bill Stone et ses collègues ont développé un dispositif SLAM propulsé par un plongeur qu'ils ont utilisé pour cartographier l'aquifère de Wakulla Springs en Floride. DEPTHX utilise sa carte intériorisée pour la navigation afin qu'il puisse se déplacer vers n'importe quel endroit spécifique sans l'aide d'une navigation externe, comme le GPS.
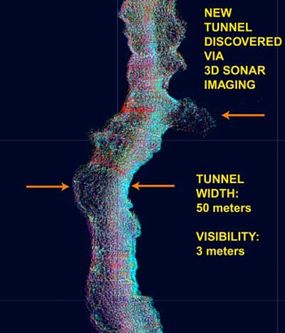 Carte d'une partie de l'aquifère de Wakulla Springs obtenue par Stone Aerospace Image © Stone Aerospace/PSC, Inc.
Carte d'une partie de l'aquifère de Wakulla Springs obtenue par Stone Aerospace Image © Stone Aerospace/PSC, Inc. DEPTHX dispose de plusieurs ordinateurs de bord dédiés à des tâches spécifiques. L'un contrôle les opérations des véhicules, SLAM et navigation ; l'un contrôle les VBE; et l'un contrôle les expériences et analyse les données. Au total, ces ordinateurs contiennent plus de 30 microprocesseurs, des contrôleurs 8 bits aux puces Pentium 4. DEPTHX est programmé pour un fonctionnement et une analyse autonomes.
DEPTHX dispose de deux tours de batteries comprenant des batteries lithium-ion rechargeables. Les batteries fournissent jusqu'à huit heures d'autonomie.
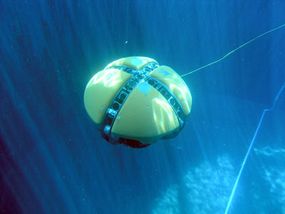 L'AUV DEPTHX sous l'eau Image © Stone Aerospace/PSC, Inc.
L'AUV DEPTHX sous l'eau Image © Stone Aerospace/PSC, Inc. Il peut communiquer par WiFi en surface et par un seul câble à fibre optique en immersion. Le câble est utilisé pour télécharger des données ou recevoir des commandes de contrôle si nécessaire.
DEPTHX utilisera ses technologies SLAM pour cartographier et imager au fur et à mesure de son exploration. Il dispose d'une caméra d'imagerie grand champ et pourra également effectuer des mesures environnementales telles que la température, pression et concentrations de divers produits chimiques. C'est également un bras extensible avec une sonde scientifique qui lui permettra de collecter des échantillons liquides et solides et un microscope à pression nominale à bord pour aider à la détection de la vie microbienne.
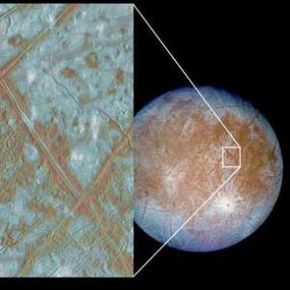 Les radeaux de glace d'Europe sont des blocs de glace qui montrent qu'Europe a peut-être eu un océan souterrain dans le passé. Image reproduite avec l'aimable autorisation du laboratoire de propulsion à réaction de la NASA
Les radeaux de glace d'Europe sont des blocs de glace qui montrent qu'Europe a peut-être eu un océan souterrain dans le passé. Image reproduite avec l'aimable autorisation du laboratoire de propulsion à réaction de la NASA Donc, pourquoi Europe, une lune intérieure de Jupiter, une cible si intéressante pour l'exploration? Les sondes spatiales Voyager et Galileo ont montré qu'Europe était recouverte d'une calotte glaciaire. Parce qu'Europe est si proche de Jupiter, la gravité de la planète tire dessus, étirant et comprimant alternativement la lune sur son orbite. Ces forces gravitationnelles créent de la chaleur dans la lune. Cette chaleur s'échappe par l'activité volcanique et pourrait réchauffer la face inférieure de la calotte glaciaire, créant un océan liquide.
La preuve d'un océan liquide existe dans le modèle fracturé de la calotte glaciaire, qui fait 10 kilomètres (6,21 milles) d'épaisseur. Des schémas similaires peuvent être observés dans la calotte glaciaire arctique vue par les satellites depuis l'orbite terrestre. Les mesures du champ magnétique indiquent que l'océan potentiel pourrait être salé. Aussi, les calculs indiquent qu'il y a une quantité suffisante de chaleur générée par les forces de marée pour faire un océan liquide.
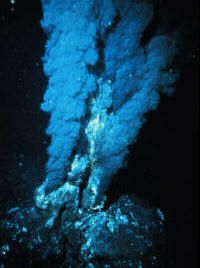 Évent hydrothermal au fond de l'océan Image reproduite avec l'aimable autorisation de la NOAA/ U.S. Dept. of Commerce
Évent hydrothermal au fond de l'océan Image reproduite avec l'aimable autorisation de la NOAA/ U.S. Dept. of Commerce S'il existe un océan liquide et qu'il existe une activité volcanique due aux forces de marée, alors il peut y avoir bouches hydrothermales au fond "océan", comme celles trouvées sur Terre près des dorsales médio-océaniques.
Sur Terre, nous savons que de nombreuses formes de vie diverses survivent autour des sources hydrothermales dans les communautés basées sur chimiosynthèse , la formation de composés organiques grâce à l'énergie géothermique. Les bactéries chimiosynthétiques forment la base de la chaîne alimentaire dans ces communautés. D'autres organismes au sein de ces communautés comprennent les vers tubicoles géants, palourdes, crabes et poissons.
Astrobiologistes croire que la vie a besoin d'eau liquide, composés (organiques) carbonés, et une source d'énergie. Europa semble également avoir ces ingrédients et, donc, pourrait avoir la vie.
Ainsi, une mission en Europe comprendrait un AUV qui pourrait explorer l'océan, réaliser des expériences scientifiques et transmettre les résultats à la Terre.
Aéronautique prévoit de construire un véhicule ultérieur appelé ENDURANCE , qui ira un peu plus loin. il sera plus petit, mais tout aussi capable que DEPTHX. Le test d'ENDURANCE sera d'explorer un lac en Antarctique qui est submergé sous la calotte glaciaire. La NASA développe actuellement la technologie pour faire fondre des kilomètres de glace dans le lac. L'ENDURANCE sera abaissée à travers le trou de fusion dans le lac pour une exploration utilisant des principes et des technologies scientifiques, développé et testé par DEPTHX.
Pour plus d'informations sur DEPTHX et les sujets connexes, consultez les liens sur la page suivante.
Sources