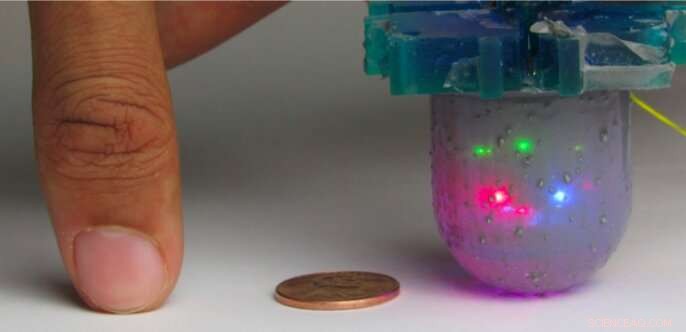
Un pouce humain à côté d'OmniTact et un centime américain ; indiquant la taille du capteur. Crédit :Padmanabha et al.
Dans les années récentes, des chercheurs du monde entier ont essayé de développer des capteurs qui pourraient reproduire le sens du toucher humain dans les robots et améliorer leurs compétences de manipulation. Alors que certains de ces capteurs ont obtenu des résultats remarquables, la plupart des solutions existantes ont de petits champs sensibles ou ne peuvent collecter que des images à faible résolution.
Une équipe de chercheurs de l'UC Berkeley a récemment développé un nouveau capteur tactile multidirectionnel, appelé OmniTact, qui surmonte certaines des limitations des capteurs développés précédemment. OmniTact, présenté dans un article pré-publié sur arXiv et qui sera présenté à l'ICRA 2020, agit comme un bout de doigt artificiel qui permet aux robots de détecter les propriétés des objets qu'ils tiennent ou manipulent.
"Notre laboratoire a reconnu le besoin d'un capteur pour les tâches générales de manipulation robotique avec des capacités étendues par rapport aux capteurs tactiles actuels, " Frédéric Ebert, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. '"Les capteurs tactiles existants sont soit plats, ont de petits champs sensibles ou ne fournissent que des signaux à faible résolution. Par exemple, le capteur GelSight offre une haute résolution (c'est-à-dire, 400x400 pixels) mais est grand et plat, offrant une sensibilité d'un seul côté, tandis que le capteur OptoForce est incurvé, mais ne fournit des lectures de force qu'en un seul point."
OmniTact, le capteur développé par Ebert et ses collègues, est une adaptation de GelSight, un capteur tactile créé par des chercheurs du MIT et de l'UC Berkeley. GelSight peut générer des cartes 3D détaillées de la surface d'un objet et détecter certaines de ses caractéristiques.
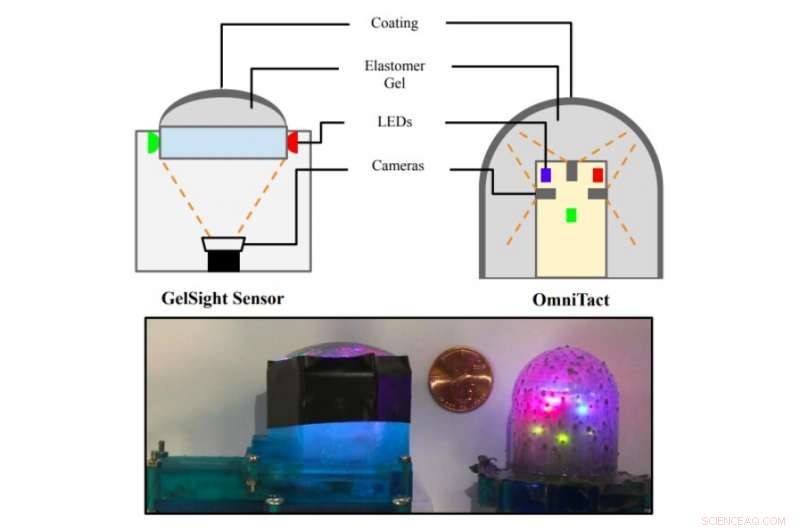
Une illustration et une image expliquant les différences fondamentales entre le capteur GelSight et OmniTact. Crédit :Padmanabha et al.
Contrairement à GelSight, OmniTact est multidirectionnel, ce qui signifie que tous ses côtés ont des capacités de détection. En outre, il peut fournir des lectures haute résolution, est très compact et a une forme incurvée. Lorsqu'il est intégré dans une pince ou une main robotique, le capteur agit comme un doigt artificiel sensible, " permettant au robot de manipuler et de détecter un large éventail d'objets de formes et de tailles variables.
OmniTact a été conçu en incorporant plusieurs micro-caméras dans une peau artificielle en gel de silicone. Les caméras détectent les déformations multidirectionnelles de la peau à base de gel, produire un signal riche qui peut ensuite être analysé par des techniques de vision par ordinateur et de traitement d'images pour déduire des informations sur les objets qu'un robot manipule.
"Notre équipe utilise des approches basées sur l'apprentissage pour utiliser le retour d'information haute résolution et éviter les procédures d'étalonnage manuel, " Akhil Padmanabha, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. "OmniTact fournit une détection tactile de tous les côtés du capteur, permettant ainsi aux robots d'avoir accès à un retour tactile tout en entrant en contact avec des objets dans n'importe quelle direction."
Ebert, Padmanabha et leurs collègues ont évalué les performances de leur capteur sur une tâche assez difficile, où un robot devait insérer un connecteur électrique dans une prise. Ils ont également testé sa capacité à déduire l'angle de contact d'un doigt lorsqu'il est pressé contre un objet donné. Dans ces premières évaluations, OmniTact a obtenu des résultats remarquables, surpassant à la fois un capteur tactile qui n'est sensible que d'un côté et un autre capteur multidirectionnel dans la tâche d'estimation d'état.
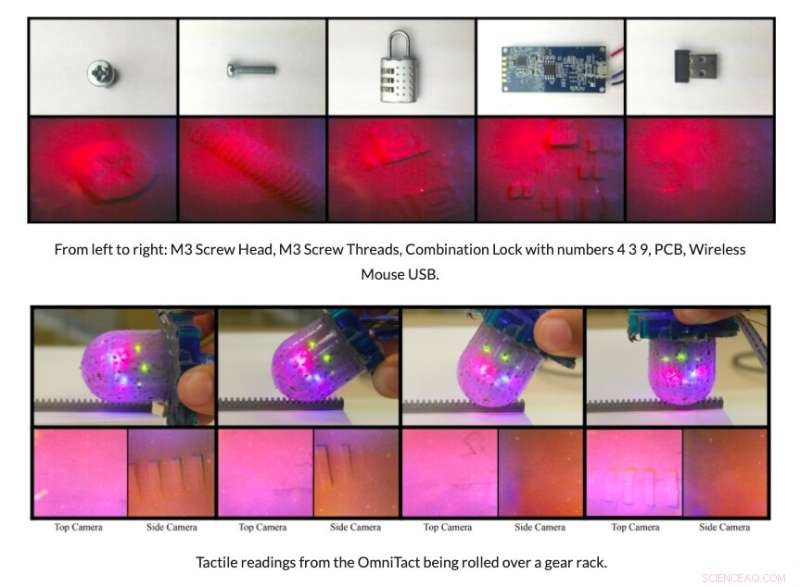
Crédit :Padmanabha et al.
"Grâce à nos expérimentations avec OmniTact, nous avons découvert que multidirectionnel, la détection tactile haute résolution permet certaines tâches de manipulation fines, comme la tâche d'insertion de connecteur que nous avons présentée, " Etienne Tian, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. « Nous soupçonnons qu'à l'avenir, la détection tactile multidirectionnelle pourrait être un élément essentiel de la manipulation robotique à usage général en plus des applications telles que la téléopération robotique en chirurgie, ainsi que dans les missions maritimes et spatiales.
Les chercheurs ont construit leur capteur à l'aide de micro-caméras qui sont généralement utilisées dans les endoscopes, coulée du gel de silicone directement sur les caméras. Par conséquent, OmniTact est beaucoup plus compact que les capteurs GelSight précédemment développés et pourrait donc avoir un plus large éventail d'applications possibles. À l'avenir, cela pourrait ouvrir la voie à la création de nouveaux robots dotés de capacités de détection plus sophistiquées.
"Nous prévoyons de rendre OmniTact moins cher et plus compact, lui permettant d'être utilisé dans un plus large éventail de tâches. Notre équipe prévoit en outre de mener davantage de recherches sur la manipulation robotique qui informeront les futures générations de capteurs tactiles, " dit Padmanabha.
© 2020 Réseau Science X