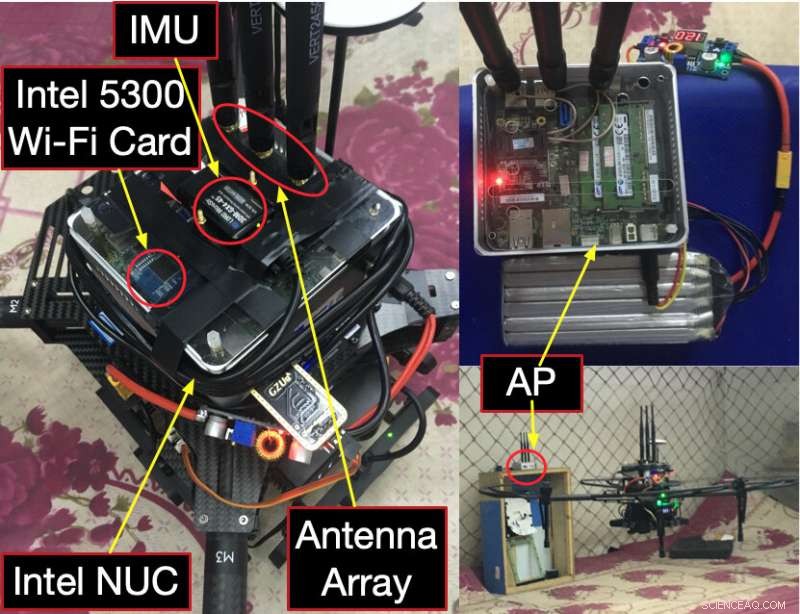
Crédit :Zhang, Wang &Jiang.
Les micro-véhicules aériens (MAV) pourraient avoir de nombreuses applications utiles, par exemple, aider les humains à effectuer des inventaires d'entrepôts ou des missions de recherche et de sauvetage. Alors que de nombreuses entreprises dans le monde ont déjà commencé à produire et à utiliser des MAV, certains de ces robots volants ont encore des limitations considérables.
Pour travailler plus efficacement, Les MAV devraient être pris en charge par un système d'estimation de pose efficace. Il s'agit d'un système ou d'une méthode permettant de calculer la position et l'attitude d'un drone, qui peut ensuite être utilisé pour contrôler son vol, régler sa vitesse et faciliter sa navigation lorsqu'il fonctionne de manière autonome et lorsqu'il est contrôlé à distance.
Des chercheurs de l'Université des sciences et technologies de Huazhong en Chine ont récemment développé un nouveau système pour l'estimation de la pose des MAV dans des environnements intérieurs. Leur nouvelle approche, décrit dans un article pré-publié sur arXIV et prévu d'être publié dans Transactions IEEE sur l'électronique industrielle , exploite l'infrastructure WiFi existante pour permettre une navigation plus efficace dans les drones petits et agiles.
« Dans nos précédents travaux, nous avons prouvé la faisabilité d'utiliser la localisabilité du WiFi pour corriger la dérive du capteur inertiel embarqué (IMU), " Shengkai Zhang, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Toutefois, la technique que nous avons développée, surnommé CWISE, ne fonctionne que dans des espaces ouverts et sans évanouissement par trajets multiples. Dans notre étude actuelle, nous poussons cette méthode plus loin pour résoudre le problème des trajets multiples dans les environnements intérieurs et rendre notre système proposé plus pratique."
L'objectif principal de la nouvelle étude menée par Zhang et ses collègues était d'utiliser une infrastructure WiFi facilement disponible pour estimer les poses 6-DoF des MAV. Contrairement aux techniques d'estimation de pose existantes basées sur la vision par ordinateur, le système qu'ils ont développé est exempt de limitations visuelles, ce qui signifie qu'il fonctionne bien dans différentes conditions d'éclairage et d'environnement.
Au lieu d'analyser les stimuli visuels collectés par les capteurs, le système exploite les nombreuses sous-porteuses des signaux de multiplexage par répartition orthogonale de la fréquence (OFDM) WiFi. Plus précisement, il utilise ces signaux pour trouver l'angle d'arrivée (AoA) du chemin direct entre un MAV et un point d'accès WiFi parmi les nombreuses réflexions du signal dans les environnements intérieurs.
Le système créé par Zhang et ses collègues comporte deux composants principaux :un algorithme d'estimation AoA et un modèle de fusion de capteurs inertiels WiFi. L'algorithme d'estimation AoA est une méthode de calcul qui estime les attitudes MAV et démêle l'AoA pour le positionnement. Le modèle de fusion de capteurs inertiels WiFi, d'autre part, combine l'AoA estimée et les données collectées à l'aide de capteurs inertiels pour optimiser les poses d'un drone.
"Il est bien connu que les angles peuvent être utilisés pour localiser une cible par triangulation, cependant, sans échelle métrique, " dit Zhang. " D'un autre côté, l'IMU d'un MAV fournit des poses métriques mais souffre de dérive temporelle. Nous fusionnons les AoA WiFi et les mesures inertielles et prenons le meilleur des deux mondes."
Le système développé par Zhang et ses collègues présente de nombreux avantages par rapport aux techniques d'estimation de pose plus conventionnelles. D'abord, il est léger et instantanément déployable dans n'importe quel environnement intérieur couvert par un réseau WiFi. De plus, il fonctionne bien dans les espaces de travail avec différentes conditions d'éclairage et de texture.
L'étude met en évidence le potentiel de l'utilisation des connexions WiFi pour améliorer les stratégies de détection et de navigation dans les robots. Lorsqu'il est testé dans une série d'expériences dans des environnements intérieurs, le nouveau système d'estimation de pose a obtenu des résultats remarquables, présentant une erreur de position moyenne de 61,7 cm et une erreur d'attitude de 0,92 degrés. À l'avenir, il pourrait être utilisé pour améliorer la navigation MAV dans les entrepôts, bureaux ou autres environnements intérieurs.
"Actuellement, la précision de notre estimateur de pose inertielle WiFi est au niveau décimétrique, " a déclaré Zhang. "Nous aimerions améliorer cela. Pendant ce temps, Le WiFi lui-même a quelques limitations, par exemple., blocage de la structure, ingérence, etc. Nous pensons que le couplage correct de la détection visuelle et de la détection sans fil permettrait d'obtenir une estimation de pose plus robuste et précise, ce qui se traduit par des robots autonomes plus pratiques."
© 2020 Réseau Science X














