Piétons, le robot bipède développé par les chercheurs, traverser la rue à côté d'un utilisateur humain. Crédit :Ahmad et al.
Les humains sont généralement capables d'adapter leur style de marche en fonction de l'environnement dans lequel ils évoluent, par exemple, accélérer si la consistance du sol sous leurs pieds le permet, ralentir lorsque le sol est glissant, changer de direction pour éviter les flaques ou les trous dans le sol, etc. Pour naviguer dans une variété d'environnements, les robots devraient être capables d'adapter leur comportement de marche de manière similaire, ajuster leur structure en réponse aux changements environnementaux.
Avec ça en tête, Des chercheurs de l'Université d'Osaka au Japon ont récemment créé PedestriANS, un robot bipède qui peut modifier certaines des caractéristiques physiques et des mouvements de ses jambes en réponse aux changements de son environnement. Ce nouveau robot, présenté dans un article publié dans la revue SAGE Comportement adaptatif , peut changer son style de marche à l'aide d'un système simple qui relie les mouvements et la configuration de ses deux jambes.
« L'objectif principal de notre travail est de développer des robots robustes capables de gérer les perturbations ; des robots capables d'accompagner les humains et de marcher efficacement sur des terrains plats comme sur des terrains accidentés tels que l'herbe et le gravier, " Huthaïfa Ahmad, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Pour atteindre cet objectif, nous devons développer des systèmes robotiques à morphologie adaptative; car même avec les robots bipèdes les plus avancés disponibles de nos jours, avoir un modèle précis du corps du robot et de l'environnement est crucial pour qu'ils fonctionnent correctement."
Piétons, le robot développé par Ahmad et ses collègues, repose sur un système de réseau d'actionneurs (ANS), un concept de design introduit dans leur travail précédent. Dans leurs études antérieures, les chercheurs ont intégré le même concept dans plusieurs autres applications, y compris les épines robotiques, bras et robots à plusieurs pattes.
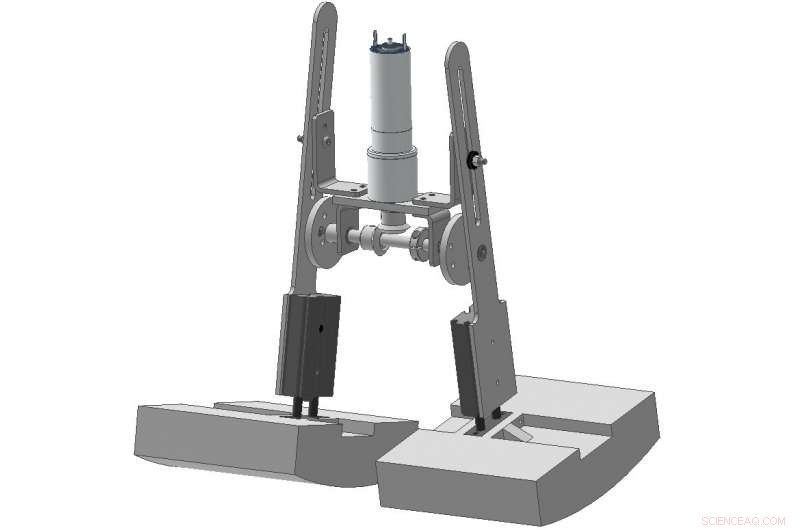
Une illustration de Piétons. Crédit :Ahmad et al.
« Comme sa faisabilité a été démontrée dans plusieurs études, J'utilise actuellement le principe ANS dans mes recherches pour réaliser des robots adaptables, en utilisant les différentes interactions entre les actionneurs montés sur leurs corps, " a dit Ahmad.
Les mouvements du robot développé par Ahmad et ses collègues sont produits par un seul moteur, et ses pattes sont reliées entre elles par un SNA. Contrairement à d'autres robots bipèdes basés sur des systèmes complexes, PedestriANS a une structure assez simple. Le robot s'adapte aux changements de son environnement en exploitant les caractéristiques physiques de ses pattes et les interactions entre ses différents composants, résultant en une gamme de comportements de marche différents.
"Le comportement de marche du robot change en changeant l'interaction entre les actionneurs de l'ANS, " a déclaré Ahmad. " Pour produire un meilleur comportement, les demandes du robot pour un certain modèle de connexion diffèrent en fonction de la situation donnée. Notre travail suggère que la meilleure façon de réaliser des robots auto-adaptables est de leur permettre d'ajuster leurs morphologies et d'exploiter la dynamique de leur corps entier en réponse aux changements environnementaux"

Piétons, le robot bipède développé par les chercheurs. Crédit :Ahmad et al.
Les chercheurs ont évalué les performances de leur robot dans une série d'expériences. Premièrement, ils ont testé l'impact des changements de morphologie du robot sur son comportement de marche en observant sa capacité à s'adapter à différents matériaux du sol, se concentrer sur les changements dans son style de marche, stabilité, la vitesse, et la direction dans laquelle il s'est déplacé.
Après avoir analysé les résultats de cette première expérience, Ahmad et ses collègues ont amélioré la conception du robot de manière à lui permettre de basculer automatiquement sur différents modèles de connexion entre ses jambes. Ils ont ensuite effectué une deuxième évaluation et constaté des améliorations significatives dans la façon dont le robot ajustait sa morphologie pendant la locomotion. Dans cette deuxième expérience, Les piétons ont effectivement produit des styles de marche adaptables en réponse à l'environnement dans lequel ils évoluaient.
À l'avenir, le robot développé par cette équipe de chercheurs pourrait être utilisé pour accomplir des tâches qui impliquent de se déplacer dans des environnements incontrôlés et en constante évolution. Alors que PedestriANS peut changer le type d'interaction entre ses jambes pour produire différents comportements de locomotion qui correspondent le mieux à son environnement, il ne parvient toujours pas à identifier de manière autonome les ajustements morphologiques les mieux adaptés à des situations spécifiques. Les chercheurs prévoient de continuer à travailler sur le robot pour activer cette capacité importante, ce qui est nécessaire pour que le robot fonctionne sans intervention et guidage humains continus.
"La prochaine étape de nos recherches sera de réaliser un système de contrôle qui puisse permettre au robot de continuer à fournir les meilleures performances pendant toutes les phases de locomotion, sélectionner de manière autonome un modèle de connexion adéquat, " dit Ahmad. " De plus, en étendant l'ANS pour inclure plus de parties du robot (par exemple, haut du corps), cela augmentera les changements morphologiques possibles, ce qui à son tour se reflète sur l'adaptabilité du robot."
© 2020 Réseau Science X