Des chercheurs du MIT ont créé une peau « sensorisée », fabriqué avec des capteurs inspirés du kirigami, qui donne aux robots mous une plus grande conscience du mouvement et de la position de leur corps. Crédit :Ryan L. Truby, MIT CSAIL
Pour la première fois, Des chercheurs du MIT ont permis à un bras robotique mou de comprendre sa configuration dans l'espace 3D, en exploitant uniquement les données de mouvement et de position de sa propre peau "capturée".
Robots souples construits à partir de matériaux hautement conformes, semblables à ceux que l'on trouve dans les organismes vivants, sont défendus comme plus sûrs, et plus adaptable, résilient, et des alternatives bio-inspirées aux robots rigides traditionnels. Mais donner un contrôle autonome à ces robots déformables est une tâche monumentale car ils peuvent se déplacer dans un nombre pratiquement infini de directions à un moment donné. Cela rend difficile la formation de modèles de planification et de contrôle qui pilotent l'automatisation.
Les méthodes traditionnelles pour obtenir un contrôle autonome utilisent de grands systèmes de plusieurs caméras de capture de mouvement qui fournissent aux robots des informations sur les mouvements et les positions en 3D. Mais ceux-ci ne sont pas pratiques pour les robots mous dans les applications du monde réel.
Dans un article publié dans la revue Lettres de robotique et d'automatisation IEEE , les chercheurs décrivent un système de capteurs souples qui recouvrent le corps d'un robot pour fournir une « proprioception », c'est-à-dire une conscience du mouvement et de la position de son corps. Ces retours se retrouvent dans un nouveau modèle d'apprentissage en profondeur qui passe au crible le bruit et capture des signaux clairs pour estimer la configuration 3D du robot. Les chercheurs ont validé leur système sur un bras robotique souple ressemblant à une trompe d'éléphant, qui peut prédire sa propre position lorsqu'il pivote et s'étend de manière autonome.
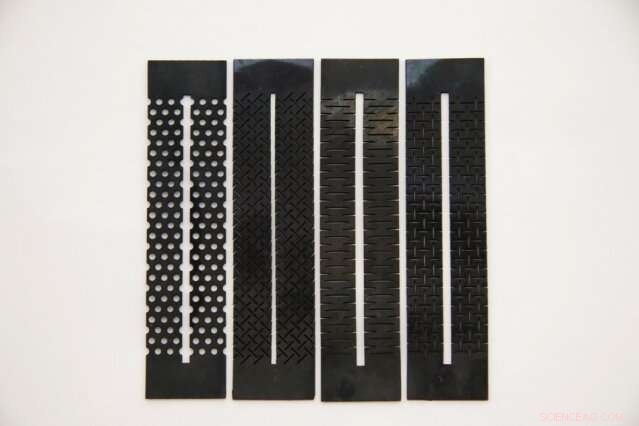
Les capteurs souples des chercheurs sont des feuilles de silicone conductrices découpées en motifs kirigami. Ils ont des propriétés « piézorésistives », ce qui signifie qu'ils changent de résistance électrique lorsqu'ils sont tendus. Au fur et à mesure que le capteur se déforme en réponse à l'étirement et à la compression du bras robotique, sa résistance électrique est convertie en une tension de sortie qui est ensuite utilisée comme signal en corrélation avec ce mouvement. Crédit :Ryan L. Truby, MIT CSAIL
Les capteurs peuvent être fabriqués à l'aide de matériaux du commerce, ce qui signifie que n'importe quel laboratoire peut développer ses propres systèmes, dit Ryan Truby, un post-doctorant au MIT Computer Science and Artificial Laboratory (CSAIL) qui est co-premier auteur de l'article avec le postdoc CSAIL Cosimo Della Santina.
« Nous capturons des robots mous pour obtenir un retour de contrôle des capteurs, pas des systèmes de vision, en utilisant un très simple, méthode rapide de fabrication, " dit-il. " Nous voulons utiliser ces malles robotiques souples, par exemple, s'orienter et se contrôler automatiquement, pour ramasser des choses et interagir avec le monde. C'est un premier pas vers ce type de contrôle automatisé plus sophistiqué."
L'un des objectifs futurs est d'aider à fabriquer des membres artificiels capables de manipuler et de manipuler plus adroitement les objets de l'environnement. "Pensez à votre propre corps :vous pouvez fermer les yeux et reconstruire le monde en fonction des retours de votre peau, " dit la co-auteur Daniela Rus, directeur du CSAIL et professeur Andrew et Erna Viterbi de génie électrique et d'informatique. "Nous voulons concevoir ces mêmes capacités pour les robots mous."
Façonner des capteurs souples

Crédit :Massachusetts Institute of Technology
Un objectif de longue date de la robotique douce a été l'intégration de capteurs corporels. Les capteurs rigides traditionnels nuisent à la conformité naturelle d'un corps de robot mou, compliquer sa conception et sa fabrication, et peut provoquer diverses pannes mécaniques. Les capteurs à base de matériaux souples sont une alternative plus appropriée, mais nécessitent des matériaux et des méthodes spécialisés pour leur conception, ce qui les rend difficiles pour de nombreux laboratoires de robotique à fabriquer et à intégrer dans des robots mous.
Alors qu'il travaillait un jour dans son laboratoire CSAIL à la recherche d'inspiration pour les matériaux des capteurs, Truby a fait une connexion intéressante. "J'ai trouvé ces feuilles de matériaux conducteurs utilisés pour le blindage contre les interférences électromagnétiques, que vous pouvez acheter n'importe où en rouleaux, " dit-il. Ces matériaux ont des propriétés " piézorésistives ", ce qui signifie qu'ils changent de résistance électrique lorsqu'ils sont tendus. Truby s'est rendu compte qu'ils pouvaient fabriquer des capteurs souples efficaces s'ils étaient placés à certains endroits sur le tronc. Comme le capteur se déforme en réponse à l'étirement et à la compression du tronc, sa résistance électrique est convertie en une tension de sortie spécifique. La tension est ensuite utilisée comme un signal en corrélation avec ce mouvement.
Mais le matériau ne s'étire pas beaucoup, ce qui limiterait son utilisation pour la robotique douce. Inspiré du kirigami, une variante de l'origami qui comprend la réalisation de découpes dans un matériau, Truby a conçu et découpé au laser des bandes rectangulaires de feuilles de silicone conductrices en divers motifs, comme des rangées de petits trous ou des tranches entrecroisées comme une clôture à mailles losangées. Cela les a rendus beaucoup plus flexibles, extensible, " et beau à regarder, " dit Truby.
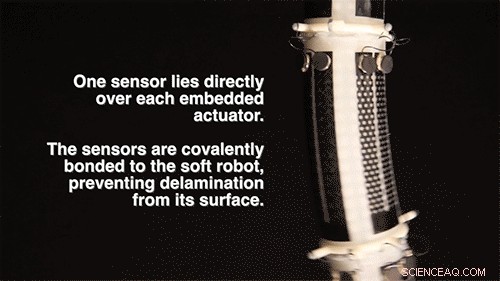
Le tronc robotique des chercheurs comprend trois segments, chacun avec quatre actionneurs fluidiques (12 au total) utilisés pour déplacer le bras. Ils ont fusionné un capteur sur chaque segment, avec chaque capteur couvrant et collectant les données d'un actionneur intégré dans le robot logiciel. Ils ont utilisé "la liaison plasma, " une technique qui dynamise la surface d'un matériau pour le faire adhérer à un autre matériau. Il faut environ quelques heures pour façonner des dizaines de capteurs qui peuvent être liés aux robots mous à l'aide d'un dispositif de liaison plasma portable.

Crédit :Massachusetts Institute of Technology
Comme supposé, les capteurs ont capturé le mouvement général du tronc. Mais ils étaient vraiment bruyants. "Essentiellement, ce sont des capteurs non idéaux à bien des égards, " dit Truby. " Mais c'est juste un fait courant de fabriquer des capteurs à partir de matériaux conducteurs souples. Des capteurs plus performants et plus fiables nécessitent des outils spécialisés que la plupart des laboratoires de robotique ne possèdent pas."
Pour estimer la configuration du robot logiciel en utilisant uniquement les capteurs, les chercheurs ont construit un réseau neuronal profond pour faire le gros du travail, en passant au crible le bruit pour capturer des signaux de retour significatifs. Les chercheurs ont développé un nouveau modèle pour décrire cinématiquement la forme du robot souple qui réduit considérablement le nombre de variables nécessaires au traitement de leur modèle.
Crédit :Ryan L. Truby, MIT CSAIL
Dans les expériences, les chercheurs ont fait pivoter le tronc et s'étendre dans des configurations aléatoires sur environ une heure et demie. Ils ont utilisé le système traditionnel de capture de mouvement pour les données de vérité terrain. Dans la formation, le modèle a analysé les données de ses capteurs pour prédire une configuration, et a comparé ses prédictions à ces données de vérité terrain qui étaient collectées simultanément. Ce faisant, le modèle « apprend » à mapper les modèles de signaux de ses capteurs aux configurations du monde réel. Résultats indiqués, que pour des configurations certaines et plus stables, la forme estimée du robot correspondait à la vérité terrain.
Prochain, les chercheurs visent à explorer de nouvelles conceptions de capteurs pour une sensibilité améliorée et à développer de nouveaux modèles et méthodes d'apprentissage en profondeur pour réduire la formation requise pour chaque nouveau robot logiciel. Ils espèrent également affiner le système pour mieux capturer tous les mouvements dynamiques du robot.
Actuellement, le réseau neuronal et la peau du capteur ne sont pas sensibles pour capturer des mouvements subtils ou des mouvements dynamiques. Mais, pour l'instant, il s'agit d'une première étape importante pour les approches basées sur l'apprentissage de la commande robotique douce, Truby dit :"Comme nos robots mous, les systèmes vivants n'ont pas besoin d'être totalement précis. Les humains ne sont pas des machines précises, par rapport à nos homologues robotiques rigides, et nous nous débrouillons très bien."
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.