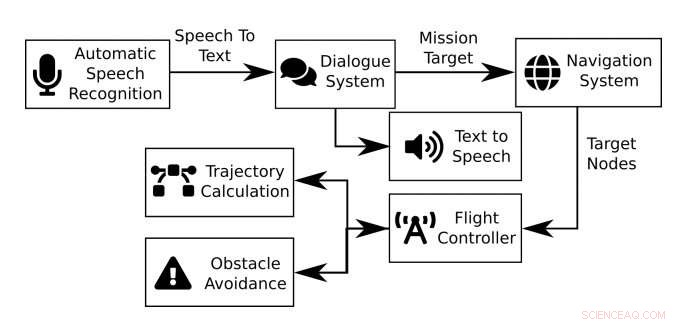
Un aperçu du système. Crédit :Fuhrman et al.
Des chercheurs de l'Institut de technologie de Karlsruhe en Allemagne ont récemment développé un drone interactif conçu pour assister les humains dans des environnements intérieurs tels que des bureaux ou des laboratoires. Dans un article prépublié sur arXiv, les chercheurs ont présenté les résultats obtenus par leur drone lors de tâches simples en laboratoire.
"Dans ce document, nous présentons un assistant drone de bureau intérieur qui est chargé de faire des courses et d'effectuer des tâches simples dans notre laboratoire, tout en recevant des instructions et en interagissant avec les humains dans l'espace, ", écrivent les chercheurs dans leur article.
La démarche de conception du drone adoptée par les chercheurs s'articule autour de la notion de « missions, " ce qui implique de recevoir des paramètres d'entrée et de remplir des conditions de succès, ou « objectifs ». Pour réussir une mission, leur drone doit être capable d'atteindre tous les objectifs qui lui sont associés.
« Dans le cas du système présenté dans cet article, le paramètre d'entrée est une demande verbale de voler vers une certaine destination (chambre ou personne) dans un environnement de bureau, ", expliquent les chercheurs dans leur article. "Le but de la mission est d'atteindre la cible sans aucune intervention manuelle ni collision avec des obstacles statiques ou dynamiques."
Le drone interactif présenté par les chercheurs est une version modifiée du drone Crazyflie 2.0, conçu par une société appelée Bitcraze. Il comporte plusieurs composants :un sous-système de reconnaissance automatique de la parole (ASR) qui transcrit les requêtes verbales d'un utilisateur; un système de dialogue qui reçoit ces demandes, les traite et identifie la cible au sein du bureau, et un contrôleur de vol qui planifie la trajectoire du drone vers la cible souhaitée tout en essayant d'éviter les collisions avec des obstacles.
Les chercheurs ont décidé d'évaluer séparément chacun des composants du système afin d'identifier clairement les caractéristiques à perfectionner. Pour évaluer le système de dialogue, ils ont demandé à trois anglophones non natifs de donner des instructions verbales simples à haute voix, par exemple, ordonner au drone de voler dans une autre pièce ou de rendre visite à une autre personne dans le laboratoire.
Ensuite, les chercheurs ont testé les capacités de perception de la profondeur et d'évitement des collisions de leur drone en présentant au drone trois types d'obstacles différents :une porte fermée, une personne, et un banc en métal. Finalement, ils ont étudié la vitesse à laquelle leur système pouvait mener à bien des missions en l'envoyant dans différentes salles cibles à l'aide d'instructions écrites.

L'un des drones Crazylife utilisés par les chercheurs. Crédit :Fuhrman et al.
Tandis que, le drone a accompli des missions avec un taux de réussite de 77,78 %, ils ont trouvé qu'il avait plusieurs limites. Par exemple, l'une des causes les plus courantes d'échec de mission était que le drone tournait légèrement pendant le décollage, car ses quatre hélices ont commencé à fonctionner à des moments légèrement différents.
"Comme il s'agit de notre premier prototype, il y a beaucoup de place pour l'amélioration future, non seulement sur chacun des composants individuels mais aussi sur le système dans son ensemble, ", ont déclaré les chercheurs.
L'équipe a observé que le système de dialogue du drone fonctionnait particulièrement mal et pouvait au mieux comprendre les instructions d'une personne dans 57% des cas. Le principal problème avec le système de dialogue était que l'ASR présentait des difficultés à identifier les noms des personnes lorsqu'ils étaient prononcés par les utilisateurs, annulant ainsi le processus de reconnaissance vocale trop tôt.
« Dans les travaux futurs, nous voulons utiliser un système ARS amélioré, " les chercheurs ont écrit dans leur article. " En outre, afin de permettre une plus grande variété de langage naturel sans augmenter la taille de l'ensemble de données d'entraînement, nous voulons également utiliser une approche multitâche. Cela signifie que l'ensemble de données du drone sera entraîné parallèlement à un ensemble de données hors domaine. »
Dans les premiers tests, le composant de détection de collision du drone s'est remarquablement bien comporté, prévenir efficacement les collisions avec les personnes et les objets volumineux dans la majorité des cas. Cependant, il s'est avéré difficile de détecter les meubles très minces ou translucides. Pour surmonter cette limite, l'équipe envisage maintenant de créer un carte en temps réel du milieu environnant, comme actuellement, le système base ses prédictions sur une carte 2D préenregistrée.
« La réduction des erreurs de position devrait également contribuer à améliorer le taux de réussite total de nos missions, car c'était l'une des principales causes d'échec de mission lors de nos tests, " les chercheurs ont expliqué dans leur article. " L'autre problème qui est apparu au cours de nos tests était le système de perception de la profondeur qui fonctionnait mal dans des conditions de lumière très vives ou changeantes. Nous prévoyons également de résoudre ces problèmes à l'avenir. »
De plus, dans leurs prochaines études, les chercheurs souhaitent améliorer la durée de vie et la gestion de la batterie du système, comme en ce moment, il ne peut accomplir que trois ou quatre missions avant de devoir être rechargé. Ils aimeraient éventuellement augmenter ce nombre de manière significative, tout en proposant de nouvelles solutions qui pourraient aider à atténuer ce problème.
© 2019 Réseau Science X