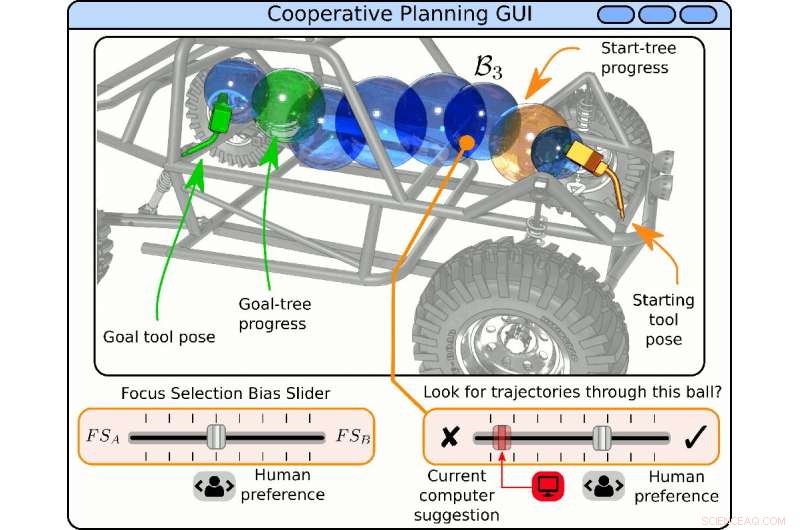
Cette image montre une interface utilisateur graphique de planification coopérative, tel qu'appliqué dans un réglage de soudage d'assemblage de cages de sécurité. le planificateur de chemin est initialement chargé de déplacer l'outil de soudage de la « pose de l'outil de départ » à la « pose de l'outil d'objectif ». Si le planificateur de chemin rencontre des difficultés à produire une solution, il avertit les opérateurs humains, qui créera ensuite une chaîne de boules qui constitue un indice sur la façon dont le robot doit passer de la « pose de l'outil de départ » à la « pose de l'outil de l'objectif ». Les opérateurs humains peuvent déplacer les balles, redimensionner les balles et déformer essentiellement la chaîne de balles jusqu'à ce que le planificateur de chemin soit capable d'exploiter les astuces données. Crédit :Pradeep Rajendran.
Des chercheurs de l'USC Viterbi Center for Advanced Manufacturing identifient un algorithme pour optimiser les robots afin de fournir des des solutions sans collision dans des espaces de fabrication complexes.
Imaginez une usine d'assemblage automobile :des milliers de tâches répétitives doivent être effectuées quotidiennement, comme l'insertion d'un volant dans une voiture. Une fois que le robot apprend la meilleure trajectoire pour aller du point A (où les roues sont empilées) au point B (où la roue doit être insérée), il peut s'exécuter des millions de fois, sans erreurs ni collisions.
Cependant, si cette tâche est modifiée, même légèrement, par exemple en augmentant la taille de la roue, le robot ne pourra pas terminer la tâche.
Pour aider à automatiser les robots pour fournir des solutions de haute qualité même dans des scénarios de fabrication complexes, des chercheurs du Center for Advanced Manufacturing (CAM) de l'USC Viterbi School of Engineering ont identifié une nouvelle approche pour automatiser les trajectoires des robots dans leurs espaces de travail. Dans une recherche présentée à la Conférence internationale sur les robots et systèmes intelligents le 4 novembre, 2019 à Macao, Chine, l'équipe de recherche, dont le professeur SK Gupta, Smith International Professor in Mechanical Engineering et CAM directeur, et Ph.D. candidat Pradeep Rajendran, a proposé un nouvel algorithme et une interface de planification de chemin qui guident les robots pour prendre le plus court, route la plus rapide d'un point source à un point de destination dans un espace de travail avec une intervention humaine minimale.
« Nous proposons une approche pour obtenir un retour d'information humain lors de la planification automatisée du chemin pour les manipulateurs opérant dans des espaces de travail très complexes, par exemple, opérations d'assemblage de satellites, " a déclaré Rajendran. " En général, les opérateurs de robot utilisent un planificateur de chemin automatique pour planifier une trajectoire pour que le robot achève la tâche dans l'espace de travail. Si la planification du chemin échoue, ce qui signifie que la trajectoire proposée ne produit pas les résultats souhaités, les opérateurs de robots doivent saisir manuellement des points de cheminement, des points spécifiques le long du chemin pour guider le robot de sa source à sa destination.
Cette situation se présente plus souvent dans des espaces de travail complexes ou confinés, comme l'opération d'assemblage du satellite, où des géométries d'espace de travail plus difficiles, les obstacles physiques et les changements ou personnalisations plus fréquents obligent les robots à exécuter des chemins complexes. Par conséquent, les opérateurs de robots perdent un temps précieux à saisir manuellement des informations pour chaque scénario, contrecarrer le but de l'utilisation de l'automatisation en premier lieu.
L'algorithme fonctionne en fournissant une interface conviviale au robot pour recueillir l'entrée de l'opérateur humain au début de la planification du chemin - le processus de cartographie de l'itinéraire que le robot doit emprunter sur le lieu de travail pour accomplir sa tâche. L'opérateur humain est alerté, grâce à des repères visuels dans le programme, vers les zones les plus complexes que le robot devra parcourir et peut fournir des informations en conséquence, produire des directives de haut niveau. Par conséquent, lorsque le robot rencontre de légères modifications dans sa tâche, comme l'augmentation de la taille de la roue susmentionnée, il pourra s'appuyer sur ces directives et ajuster sa trajectoire en conséquence.
La méthode conçue par des chercheurs du département de génie aérospatial et mécanique de l'USC Viterbi, qui comprend également l'associé de recherche postdoctoral Ariyan Kabir, doctorat l'étudiant Shantanu Thakar et le chercheur en CAM Brual Shah—donnent la priorité à l'automatisation, en veillant à ce que le programme de planification des sentiers n'obtienne de l'aide que lorsqu'elle est nécessaire. Il faut généralement 15 à 30 minutes pour spécifier un chemin manuellement; avec l'algorithme de planification de chemin, le chemin peut être généré en quelques secondes.
« Dans la fabrication de petits volumes, les robots effectuent de nombreuses tâches non répétitives qui changent fréquemment. Programmer des robots pour chacune de ces itérations de tâches est non seulement chronophage, c'est fastidieux et inefficace, " a déclaré Rajendran. "Avec ce nouvel algorithme, nous démontrons que de nombreux processus non répétitifs rencontrés dans les applications de fabrication de petits volumes peuvent être automatisés facilement, avec une contribution minimale d'opérateurs humains."