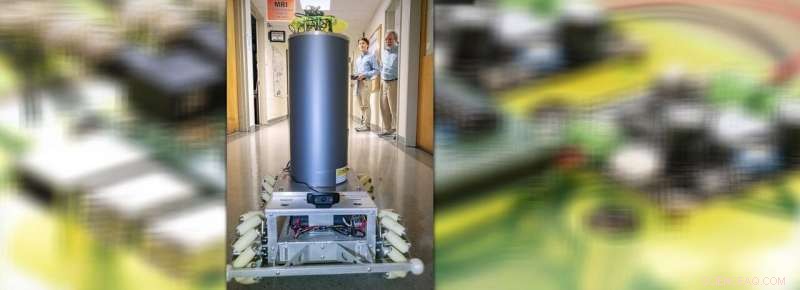
Robot détecteur dans le couloir PPPL avant le test neutronique. Derrière le robot de gauche, Harry Fetsch, Stagiaire de premier cycle en sciences (SULI) et Rob Goldston, co-chercheur principal du projet. Crédit :Elle Starkman/Bureau des communications du PPPL
Imaginez un essaim d'autonomes, des robots roulants de trois pieds armés de détecteurs intelligents pour soutenir les garanties nucléaires et vérifier les accords de contrôle des armements. Le prototype de tels robots, en cours de développement par le Laboratoire de physique des plasmas de Princeton (PPPL) du Département de l'énergie des États-Unis (DOE) et l'Université de Princeton, a récemment démontré la capacité d'identifier la source de rayonnement nucléaire et si elle a été blindée pour éviter la détection.
La détection de neutrons d'un élément radioactif dans le test PPPL a couronné un projet de deux ans financé par le Département d'État américain qui contribue également au Consortium du DOE sur la technologie de vérification. Le prototype télécommandé ouvre la voie à la poursuite du développement d'un essaim mobile et entièrement autonome. « La démonstration a totalement confirmé la capacité du robot à détecter la source de neutrons et a fourni de belles données, " a déclaré Rob Goldston, physicien du PPPL, professeur de sciences astrophysiques à l'Université de Princeton, et un chercheur principal du projet.
"Tout est excellent et prometteur"
Co-chercheur principal Alex Glaser, professeur d'ingénierie à Princeton et codirecteur du Princeton Program in Science and Global Security, était tout aussi exubérant. "Tout ce que nous avons vu semble excellent et très prometteur, " a-t-il déclaré. " PPPL a apporté un grand soutien à ce projet. "
Le "bot inspecteur" désormais calibré se compose d'un cylindre en plastique polyéthylène contenant trois compteurs de neutrons espacés de 120 degrés et monté sur un robot avec des roues spécialisées qui lui permettent de se déplacer dans n'importe quelle direction. Les détecteurs, conçu par Goldston et Moritz Kütt, un ancien chercheur postdoctoral de Princeton, fournit à la fois une sensibilité élevée à l'énergie des neutrons détectés et à la direction d'où proviennent les neutrons. Une faible énergie pourrait indiquer un blindage.
Une fois pleinement développé, le robot pourrait faire partie d'un essaim d'appareils qui effectuent des tâches d'inspection dans différents types d'installations. Les applications proposées pourraient inclure :

Robot détecteur de neutrons avec développeurs et membres de l'équipe PPPL Health Physics. De gauche à droite :Cathy Saville; Susan Thiel; Alex Glaser; Darren Thompson; Soha Aslam, étudiant diplômé de l'Université de Princeton; Robert Hitchner; Rob Goldston; Georges Ascione; Andy Carpe; Patty Bruno. Goldston a déclaré:"Je suis incroyablement reconnaissant pour le professionnalisme et le soutien de l'équipe de physique de la santé qui a aidé à calibrer le robot. Un immense mérite revient également à Andy Carpe qui nous a guidés sur toutes sortes d'obstacles." Crédit :Elle Starkman/Bureau des communications du PPPL
Logiciel d'apprentissage automatique
La prochaine étape du développement comprend la conception d'un logiciel d'apprentissage automatique pour guider les robots, et la technologie pour permettre aux robots de communiquer entre eux pendant les inspections. Le système d'intelligence artificielle (IA), dirigé par la chercheuse principale Naomi Leonard, le professeur Edwin S. Wilsey de génie mécanique et aérospatial à Princeton, utilise ce qu'on appelle l'approche du bandit à plusieurs bras, un système statistique nommé pour obtenir les meilleurs résultats d'une série de machines à sous. Le principal défi dans la recherche d'activités non déclarées est de faire un choix judicieux entre continuer à explorer et arrêter d'exploiter de petits signaux qui pourraient indiquer une mauvaise conduite.
L'idée du projet remonte à 2014, lorsque Goldston et Mark Walker, un étudiant diplômé, entendu parler d'un autre laboratoire qui a installé un plafond avec des détecteurs de neutrons qui se sont tous déclenchés lors du passage d'un camion transportant du gaz d'uranium pour l'enrichissement. Cela a conduit à parler d'un système de détection de robot. "J'ai dit, « Et un robot ? » se souvient Goldston, et Marc a dit, "Et un robot, ça a l'air fou!"
Mais Goldston a été encouragé à explorer cette option lors de discussions avec les inspecteurs de l'Agence internationale de l'énergie atomique (AIEA) et les exploitants de centrales. Glaser a soumis une proposition au département d'État des États-Unis avec un contrat de sous-traitance pour PPPL pour construire et calibrer un seul robot inspecteur, c'est ce que l'équipe a réalisé.
Vitesse supérieure
Le projet est passé à la vitesse supérieure l'été dernier. Harry Fetsch, un étudiant en physique au Harvey Mudd College dans le cadre du stage de premier cycle en sciences (SULI) au PPPL, a couru des milliers d'heures informatiques pour simuler le système de détection. "Ces simulations ont éclairé la conception des expériences que nous avons menées, " dit Glaser.
Goldston prévoit maintenant de visiter l'usine de fabrication de combustible nucléaire du site de Savannah River du DOE pour explorer la possibilité de tester le robot inspecteur dans une installation où la production des usines d'enrichissement est acheminée. "Nous voulons voir si nous pouvons mesurer les neutrons qui sortent des autoclaves, " a-t-il dit à propos des appareils utilisés pour chauffer l'uranium pour l'envoyer dans l'usine de fabrication.
Avec le développement ultérieur, le projet pourrait démontrer « que simple et robuste autonome, mobile, des détecteurs de neutrons sensibles à la direction et au spectre pourraient fournir un moyen rentable de fournir une vérification efficace et efficiente, " dit Goldston.