Crédit :Université de Bristol
Dans une nouvelle tournure de la recherche homme-robot, des informaticiens de l'Université de Bristol ont développé un robot portatif qui prédit d'abord puis frustre les utilisateurs en se rebellant contre leurs plans, démontrant ainsi une compréhension de l'intention humaine.
Dans un monde de plus en plus technologique, la coopération entre l'homme et la machine est un aspect essentiel de l'automatisation. Cette nouvelle recherche montre que frustrer les gens à dessein fait partie du processus de développement de robots qui coopèrent mieux avec les utilisateurs.
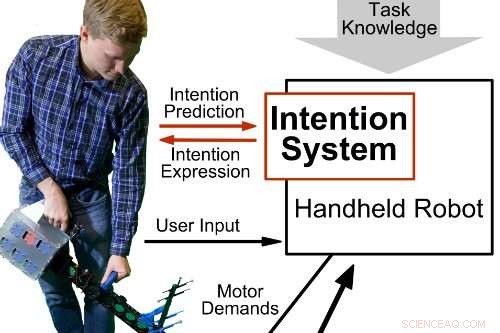
L'équipe de Bristol a développé des des robots portatifs qui effectuent des tâches en collaboration avec l'utilisateur. Contrairement aux outils électriques conventionnels, qui ne connaissent rien des tâches qu'ils effectuent et sont entièrement sous le contrôle des utilisateurs, le robot portatif détient des connaissances sur la tâche et peut aider par des conseils, mouvement affiné et décisions concernant les séquences de tâches.
Bien que cela aide à accomplir les tâches plus rapidement et avec une plus grande précision, les utilisateurs peuvent s'énerver lorsque les décisions du robot ne sont pas conformes à leurs propres plans.
Dernières recherches dans cet espace par Ph.D. le candidat Janis Stolzenwald et le professeur Walterio Mayol-Cuevas, du Département d'informatique de l'Université de Bristol, explore l'utilisation d'outils intelligents qui peuvent biaiser leurs décisions en réponse à l'intention des utilisateurs.
Cette recherche est une nouvelle tournure intéressante de la recherche homme-robot, car elle vise d'abord à prédire ce que les utilisateurs veulent, puis à aller à l'encontre de ces plans.
Le professeur Mayol-Cuevas a déclaré :« Si vous êtes frustré par une machine destinée à vous aider, cela est plus facile à identifier et à mesurer que les signaux souvent insaisissables de la coopération homme-robot. Si l'utilisateur est frustré lorsque nous demandons au robot de se rebeller contre ses plans, nous savons que le robot a compris ce qu'il voulait faire."
"Tout comme les prédictions à court terme des actions des uns et des autres sont essentielles au succès du travail d'équipe humain, nos recherches montrent que l'intégration de cette capacité dans les systèmes robotiques coopératifs est essentielle à une coopération homme-machine réussie. »
Pour l'étude, les chercheurs ont utilisé un prototype qui peut suivre le regard de l'utilisateur et dériver des prédictions à court terme sur les actions prévues grâce à l'apprentissage automatique. Cette connaissance est ensuite utilisée comme base pour les décisions du robot telles que l'endroit où se déplacer ensuite.
L'équipe de Bristol a entraîné le robot dans l'étude à l'aide d'un ensemble de plus de 900 exemples d'entraînement à partir d'une tâche de sélection et de placement effectuée par les participants.
L'évaluation du modèle intention-prédiction est au cœur de cette recherche. Les chercheurs ont testé le robot dans deux cas :l'obéissance et la rébellion. Le robot a été programmé pour suivre ou désobéir à l'intention prédite de l'utilisateur. Connaître les objectifs de l'utilisateur a donné au robot le pouvoir de se rebeller contre ses décisions. La différence de réponses de frustration entre les deux conditions a servi de preuve de l'exactitude des prédictions du robot, validant ainsi le modèle intention-prédiction.
Janis Stolzenwald, un doctorat étudiant parrainé par la German Academic Scholarship Foundation et l'EPSRC du Royaume-Uni, a mené les expérimentations utilisateurs et identifié de nouveaux défis pour l'avenir. Il a déclaré :« Nous avons constaté que le modèle d'intention est plus efficace lorsque les données du regard sont combinées à la connaissance des tâches. Cela soulève une nouvelle question de recherche :comment le robot peut-il récupérer cette connaissance ? Nous pouvons imaginer apprendre à partir d'une démonstration ou impliquer un autre humain dans le tâche."
En vue de ce nouveau challenge, les chercheurs explorent actuellement le contrôle partagé, interaction et de nouvelles applications dans le cadre de leurs études sur la collaboration à distance via le robot portatif. Une tâche de maintenance sert d'expérience utilisateur, où un utilisateur de robot portatif reçoit l'assistance d'un expert qui contrôle à distance le robot.
La recherche s'appuie sur le robot portatif conçu et construit par l'ancien Ph.D. étudiant Austin Gregg-Smith, et qui est disponible en tant que conception open source via le site du chercheur à l'adresse www.handheldrobotics.org.














