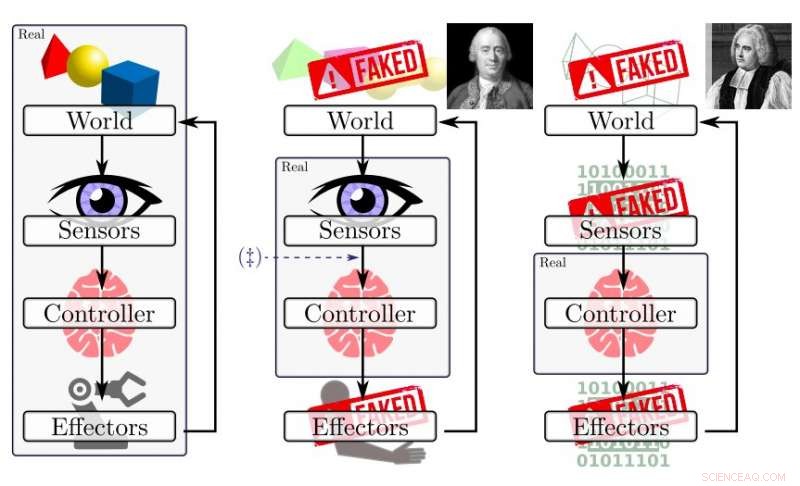
Une illustration de différents modes de truquage assortis de positions intellectuelles appropriées :le point de vue orthodoxe (à gauche) et deux formes de scepticisme philosophique (au centre et à droite). La colonne de gauche représente une expérience de robot physique de bout en bout, chaque partie étant réelle. La colonne du milieu, portant le buste de David Hume, implique de vrais capteurs mais aussi des raisons de douter de la véracité du monde qu'ils rapportent. La colonne la plus à droite, dirigé par l'évêque Berkeley, a un vrai contrôleur mais tous les autres éléments sont de simples logiciels - il représente une expérience de robot menée en simulation (pour l'usage courant de ce terme) où l'information est injectée directement dans le cortex du robot. La colonne de Hume est le cas étudié dans l'article :les robots perçoivent un monde médié par des capteurs ancrés dans le monde réel, mais c'est un monde de « rien d'autre que du sophisme et de l'illusion ». Crédit : Shell &O'Kane.
Pour évaluer les performances des algorithmes et des contrôleurs robotiques, les chercheurs utilisent généralement des simulations logicielles ou de vrais robots physiques. Bien qu'elles puissent apparaître comme deux stratégies d'évaluation distinctes, il existe toute une autre gamme de possibilités qui combinent des éléments des deux.
Dans une étude récente, des chercheurs de la Texas A&M University et de l'Université de Caroline du Sud se sont engagés à examiner des scénarios d'évaluation et d'exécution qui se situent à l'intersection entre les simulations et les mises en œuvre réelles. Leur enquête, décrit dans un article prépublié sur arXiv, se concentre spécifiquement sur les cas où de vrais robots perçoivent le monde via leurs capteurs, où l'environnement qu'ils perçoivent pourrait être considéré comme une simple illusion.
"Nous considérons des problèmes dans lesquels les robots conspirent pour présenter une vision du monde qui diffère de la réalité, " Dylan Shell et Jason O'Kane, les chercheurs qui ont mené l'étude, écrit dans leur journal. "L'enquête est motivée par le problème de la validation physique du comportement des robots malgré un décalage entre les robots dont nous disposons et ceux que nous souhaitons étudier, ou l'environnement de test qui est disponible par rapport à celui qui est souhaité, ou d'autres discordances potentielles dans cette veine."
L'étude s'inspire de recherches biologiques antérieures, qui visait à comprendre les limites perceptives des organismes vivants et comment les inadéquations informationnelles peuvent affecter leur comportement. Dans les années récentes, les biologistes ont commencé à utiliser des outils technologiques tels que la réalité virtuelle (VR) et la réalité augmentée (AR) pour mieux comprendre les organismes biologiques et leurs perceptions.
De la même manière, les simulations logicielles sont devenues un élément clé de la recherche en robotique, avec de nombreux chercheurs qui les utilisent pour exécuter et tester leurs systèmes et approches robotiques. Dans la plupart de ces cas, un logiciel de simulation reproduit de manière virtuelle certains éléments de l'exécution d'un robot, plutôt que physique, environnement, générer des lectures de capteurs artificiels ou des données liées à l'état.
Cela pose une autre question :à quel point un simulateur, qui est un système en soi, reproduire réellement le monde réel? Avec ça en tête, les chercheurs ont entrepris d'explorer les relations entre des paires de systèmes qui « correspondent, " ainsi que les cas dans lesquels l'un de ces systèmes est suffisamment puissant pour évoquer une illusion sur l'autre.
"Après avoir formulé le concept d'une illusion convaincante, essentiellement une notion de simulation de système qui se déroule dans le monde réel, nous examinons les implications de ce type de simulabilité en termes d'exigences d'infrastructure, " Shell et O'Kane ont expliqué dans leur article. " Le temps est une ressource importante :certains robots peuvent être capables d'en simuler d'autres mais, peut-être, seulement à un rythme plus lent qu'en temps réel."
Shell et O'Kane suggèrent que les différentes vitesses auxquelles les systèmes peuvent simuler d'autres systèmes permettent aux chercheurs de décrire les systèmes simulés et simulés sous une forme relative. Sur la base de cette hypothèse, ils ont développé des théorèmes pour décrire la relation entre un système simulé et un système simulé, offrant plusieurs exemples pour chacun.
Ensuite, les chercheurs ont réalisé une expérience multi-robot simple basée sur la théorie qu'ils ont développée. Dans cette expérience, un robot devait accomplir une tâche de navigation simple dans un champ d'obstacles illimité, à la fois en simulation et sur un banc d'essai de robot physique. Leurs résultats suggèrent que différentes approches de simulation peuvent avoir des efficacités temporelles très différentes pour produire une illusion pour un système donné.
Les observations recueillies par Shell et O'Kane, ainsi que la théorie qu'ils ont développée, pourrait élargir la compréhension actuelle des logiciels de simulation utilisés pour évaluer les approches robotiques, mettant en évidence de nouveaux aspects de la relation entre systèmes simulés et systèmes simulés. Dans leurs futurs travaux, ils pourraient explorer une variété de nouvelles directions de recherche, par exemple en étendant leur théorie pour aborder les notions d'incertitude et de non-déterminisme ou en développant une théorie plus riche des illusions efficaces.
© 2019 Réseau Science X














