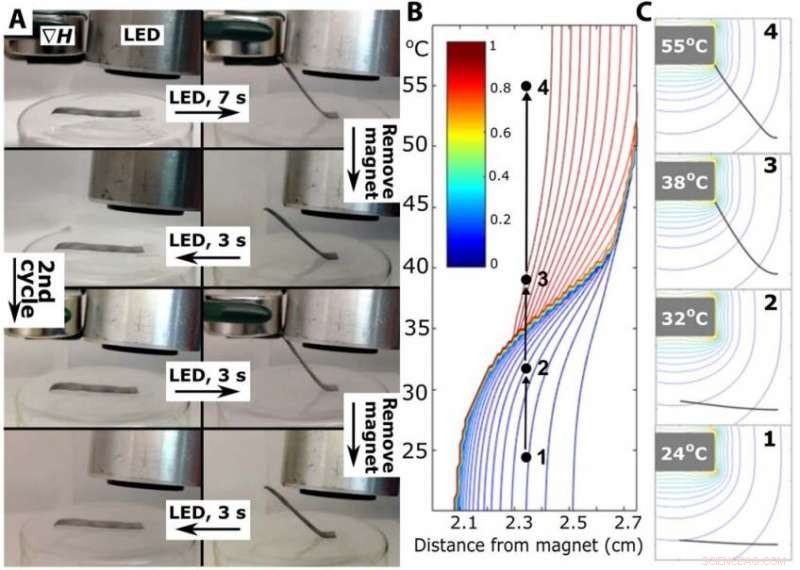
Porte-à-faux à mémoire de forme contenant des particules magnétiques enchaînées. (A) Actionnement et (B et C) simulations d'un film en porte-à-faux DiAPLEX contenant des particules magnétiques enchaînées. L'aimant permanent (∇H) et la LED sont indiqués dans le panneau supérieur gauche. (B) Les contours montrent le degré d'actionnement (0, appartement; 1, en contact avec l'aimant) d'un filament simulé sur une plage de positions et de températures. (C) Les images fixes simulées correspondent à des points discrets le long du chemin indiqué en (B), à une distance de 2,3 cm de l'aimant, ce qui est cohérent avec la géométrie expérimentale de gauche. Voir les films S1 et S2 pour des expériences et des simulations du porte-à-faux. Crédit :Jessica A.-C. Liu, Université d'État de Caroline du Nord.
Des chercheurs de l'université d'État de Caroline du Nord et de l'université d'Elon ont mis au point une technique qui leur permet de contrôler à distance le mouvement de robots mous, verrouillez-les en position aussi longtemps que nécessaire et reconfigurez plus tard les robots dans de nouvelles formes. La technique repose sur la lumière et les champs magnétiques.
« Nous sommes particulièrement enthousiasmés par la reconfigurabilité, " dit Joe Tracy, professeur de science et d'ingénierie des matériaux à l'État de Caroline du Nord et auteur correspondant d'un article sur le travail. « En manipulant les propriétés du matériau, nous pouvons contrôler à distance le mouvement du robot mou; nous pouvons lui faire tenir une forme donnée; on peut alors remettre le robot dans sa forme d'origine ou encore modifier son mouvement; et nous pouvons le faire à plusieurs reprises. Toutes ces choses ont de la valeur, en termes d'utilité de cette technologie dans les applications biomédicales ou aérospatiales."
Pour ce travail, les chercheurs ont utilisé des robots souples constitués d'un polymère incrusté de microparticules de fer magnétiques. Sous des conditions normales, le matériau est relativement rigide et conserve sa forme. Cependant, les chercheurs peuvent chauffer le matériau à l'aide de la lumière d'une diode électroluminescente (LED), ce qui rend le polymère souple. Une fois pliable, les chercheurs ont démontré qu'ils pouvaient contrôler la forme du robot à distance en appliquant un champ magnétique. Après avoir formé la forme désirée, les chercheurs pourraient retirer la lumière LED, permettant au robot de reprendre sa rigidité d'origine, verrouillant efficacement la forme en place.
En appliquant la lumière une seconde fois et en supprimant le champ magnétique, les chercheurs pourraient faire en sorte que les robots mous retrouvent leur forme d'origine. Ou ils pourraient à nouveau appliquer la lumière et manipuler le champ magnétique pour déplacer les robots ou leur faire adopter de nouvelles formes.
Dans les tests expérimentaux, les chercheurs ont démontré que les robots mous pouvaient être utilisés pour former des « grabbers » pour soulever et transporter des objets. Les robots mous pourraient également être utilisés comme porte-à-faux, ou plié en "fleurs" avec des pétales qui se plient dans des directions différentes.
"Nous ne sommes pas limités aux configurations binaires, comme une pince ouverte ou fermée, " dit Jessica Liu, premier auteur de l'article et titulaire d'un doctorat. étudiant à NC State. "Nous pouvons contrôler la lumière pour garantir qu'un robot conservera sa forme à tout moment."
En outre, les chercheurs ont développé un modèle informatique qui peut être utilisé pour rationaliser le processus de conception de robots souples. Le modèle leur permet d'affiner la forme d'un robot, épaisseur de polymère, l'abondance de microparticules de fer dans le polymère, et la taille et la direction du champ magnétique requis avant de construire un prototype pour accomplir une tâche spécifique.
"Les prochaines étapes incluent l'optimisation du polymère pour différentes applications, " dit Tracy. " Par exemple, polymères techniques qui réagissent à différentes températures afin de répondre aux besoins d'applications spécifiques."
Le papier, "Reconfiguration à commande photothermique et magnétique des composites polymères pour la robotique douce, " apparaît dans le journal Avancées scientifiques . Le premier auteur de l'article est Jessica Liu, un doctorat étudiant à NC State. L'article a été co-écrit par Jonathan Gillen, un ancien premier cycle à NC State; Sumeet Mishra, un ancien Ph.D. étudiant à NC State; et Benjamin Evans, professeur agrégé de physique à l'université d'Elon.














