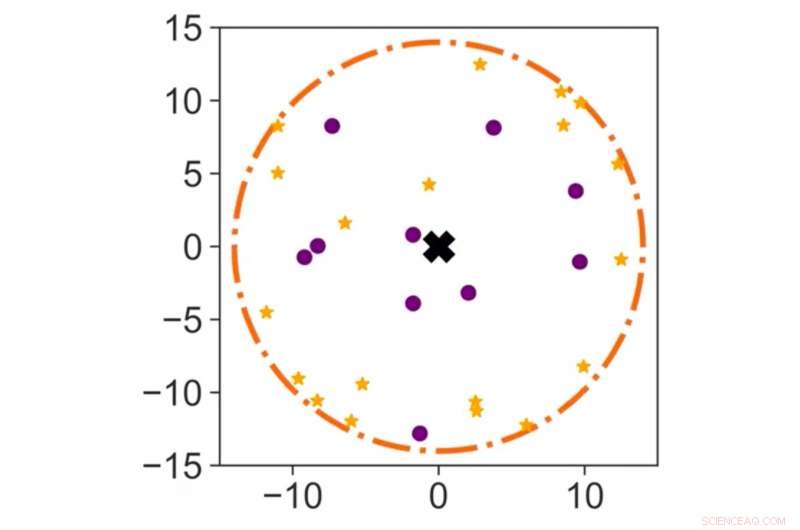
Crédit :Obute, Dogar &Boyle.
De nombreux animaux et micro-organismes sont capables d'accomplir des tâches complexes, comme trouver de la nourriture ou construire des nids, comme une équipe, ou "essaim". L'un des exemples les plus évidents est celui des abeilles, car leur survie en tant que groupe dépend fortement de la coopération avec les autres membres de leur colonie. Au cours des dernières années, un nombre croissant de chercheurs ont tenté de reproduire cette fascinante dynamique de groupe chez les robots, donnant lieu à un domaine d'étude appelé robotique en essaim.
Des chercheurs de l'Université de Leeds ont récemment présenté une nouvelle approche de robotique en essaim appelée chimiotaxie, inspiré d'un comportement particulier observé chez les micro-organismes, . Leur étude, prépublié sur arXiv, découle de l'intérêt des auteurs pour la survie d'animaux invertébrés simples dans des environnements dynamiques réels, et comment ces stratégies peuvent être appliquées dans les robots.
"Au cours de mon doctorat et de mon premier stage postdoctoral, J'ai étudié le système de locomotion d'un petit ver appelé C. elegans (un organisme modèle populaire), et appliqué avec succès ce que j'ai appris pour contrôler la locomotion d'un robot ressemblant à un serpent, " Jordan Boyle, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « L'œuvre actuelle s'inspire du même organisme, mais cette fois, en regardant son comportement de niveau supérieur, en particulier la façon dont il navigue vers les sources de nourriture en utilisant son odorat. »
En l'absence d'entrées sensorielles, C. elegans les vers avancent généralement, mais faites de grands virages à des intervalles de temps aléatoires. S'ils sentent qu'une odeur « positive » devient plus forte lorsqu'ils se déplacent dans une direction particulière, la fréquence de leurs tours diminue. Inversement, lorsque l'odeur « positive » ou « désirée » s'affaiblit, il y a une plus grande probabilité qu'ils se retournent. Ce comportement, connu sous le nom de chimiotaxie, leur permet finalement de graviter vers des endroits où un stimulus sensoriel souhaité est à son apogée. Dans leur étude, Boyle, son collègue Mehmet Dogar et Ph.D. L'étudiant Simon Obute a entrepris de reproduire cette stratégie de groupe dans des essaims robotiques et d'évaluer son utilité.
"Un avantage clé de cette stratégie est qu'elle n'a besoin que d'un seul capteur analogique, parce que les gradients sont détectés au fil du temps au fur et à mesure que l'animal se déplace, " Boyle a expliqué. " Dans notre travail, nous avons remplacé l'odeur par le son, parce qu'il est beaucoup plus facile de créer et de ressentir avec un robot, et s'affaiblit également à mesure que vous vous éloignez de la source, " Boyle a expliqué. " Les principaux avantages de cette approche sont qu'elle permet à un groupe de robots d'essaim d'être confiné dans une zone spécifique (c'est-à-dire autour d'une source sonore) sans avoir besoin d'une limite physique, capacité de cartographie ou systèmes sensoriels complexes."
En utilisant un algorithme qu'ils ont développé, les chercheurs ont appliqué la chimiotaxie à un essaim de robots d'exploration, les incitant finalement à retourner dans une zone de travail donnée autour de leur nid situé dans un environnement illimité. Ils ont testé leurs performances, et donc l'efficacité de leur approche, dans une série d'expériences de simulation et de validation matérielle. Bien que leurs résultats soient principalement basés sur des simulations et non sur des implémentations réelles, les chercheurs ont découvert qu'ils avaient réussi à incorporer des modèles précis de propagation du son.
"Nos résultats matériels sont préliminaires mais prometteurs à ce stade, " Boyle a dit. " En fin de compte, ce travail pourrait être pertinent pour des essaims physiques constitués de très petits, robots bon marché avec des capacités sensorielles et informatiques limitées. Bien que pratique, le déploiement dans le monde réel d'essaims de robots est encore loin, ils ont du potentiel dans de nombreuses applications."
À l'avenir, des expériences avec de vrais robots pourraient aider à vérifier l'efficacité de cette nouvelle approche bio-inspirée. Si ces tests donnent des résultats positifs, l'algorithme développé par Boyle et ses collègues pourrait éventuellement être utilisé pour améliorer les stratégies de navigation et d'orientation des essaims robotiques, en particulier lorsque les environnements dans lesquels ils naviguent ne sont pas clairement cartographiés ou définis.
Obute travaille maintenant sur l'intégration de la chimiotaxie dans des systèmes robotiques en essaim plus complexes, dans les simulations ainsi que dans quelques expériences matérielles. Son doctorat final. Le projet étudie spécifiquement la possibilité d'utiliser des robots en essaim pour la collecte des déchets urbains. Boyle, d'autre part, prévoit de continuer à explorer des stratégies biologiques qui pourraient s'avérer particulièrement utiles pour les applications robotiques.
"Actuellement, I'm interested in applying similar techniques to a major project I'm involved in that aims to develop robot systems for monitoring the integrity of sewer and water distribution networks, " Boyle said.
© 2019 Réseau Science X