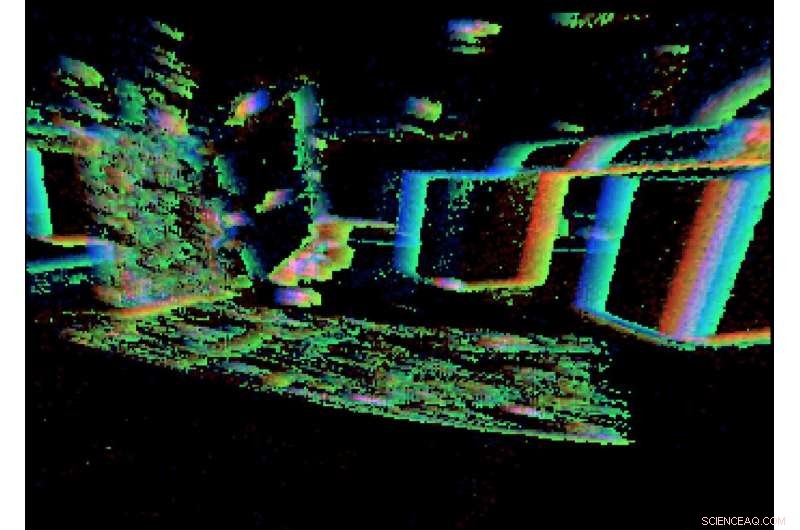
Le laboratoire des chercheurs, vu par le capteur de vision dynamique. Crédit :Groupe Perception et Robotique, Université du Maryland.
José Altuve des Astros de Houston monte au créneau sur un compte de 3-2, étudie le pichet et la situation, obtient le feu vert de la troisième base, suit la sortie du ballon, balançoires ... et obtient un single au milieu. Juste un autre voyage à la plaque pour le triple champion au bâton de la Ligue américaine.
Un robot pourrait-il être touché dans la même situation ? Pas probable.
Altuve a aiguisé les réflexes naturels, des années d'expérience, connaissance des tendances du lanceur, et une compréhension des trajectoires des différents pas. Ce qu'il voit, entend, et se sent parfaitement combiné avec sa mémoire cérébrale et musculaire pour chronométrer le swing qui produit le coup. Le robot, d'autre part, doit utiliser un système de liaison pour coordonner lentement les données de ses capteurs avec ses capacités motrices. Et il ne se souvient de rien. Frappez trois !
Mais il peut y avoir de l'espoir pour le robot. Un article de chercheurs de l'Université du Maryland vient de paraître dans la revue Robotique scientifique introduit une nouvelle façon de combiner la perception et les commandes motrices en utilisant la théorie dite de l'informatique hyperdimensionnelle, ce qui pourrait fondamentalement modifier et améliorer la tâche de base de l'intelligence artificielle (IA) de la représentation sensorimotrice - comment des agents comme les robots traduisent ce qu'ils ressentent en ce qu'ils font.
« Apprendre le contrôle sensorimoteur avec des capteurs neuromorphiques :vers une perception active hyperdimensionnelle » a été écrit par un doctorat en informatique. étudiants Anton Mitrokhin et Peter Sutor, Jr. ; Cornélia Fermüller, chercheur associé au University of Maryland Institute for Advanced Computer Studies; et le professeur d'informatique Yiannis Aloimonos. Mitrokhin et Sutor sont conseillés par Aloimonos.
L'intégration est le défi le plus important auquel est confronté le domaine de la robotique. Les capteurs d'un robot et les actionneurs qui le déplacent sont des systèmes distincts, reliés entre eux par un mécanisme d'apprentissage central qui induit une action nécessaire en fonction des données du capteur, ou vice versa.
Le système d'IA encombrant en trois parties - chaque partie parlant sa propre langue - est un moyen lent d'amener les robots à accomplir des tâches sensorimotrices. La prochaine étape en robotique sera d'intégrer les perceptions d'un robot à ses capacités motrices. Cette fusion, connue sous le nom de "perception active, " fournirait au robot un moyen plus efficace et plus rapide d'accomplir des tâches.
Dans la nouvelle théorie informatique des auteurs, le système d'exploitation d'un robot serait basé sur des vecteurs binaires hyperdimensionnels (VHB), qui existent dans un espace clairsemé et de très grande dimension. Les VHB peuvent représenter des choses discrètes disparates, par exemple, une seule image, un concept, un son ou une instruction ; séquences composées de choses discrètes; et des groupements de choses et de séquences discrètes. Ils peuvent rendre compte de tous ces types d'informations d'une manière significativement construite, liant chaque modalité ensemble dans de longs vecteurs de 1 et de 0 de dimension égale. Dans ce système, possibilités d'action, l'entrée sensorielle et d'autres informations occupent le même espace, sont dans la même langue, et sont fusionnés, créant une sorte de mémoire pour le robot.
Les Robotique scientifique papier marque la première fois que perception et action sont intégrées.
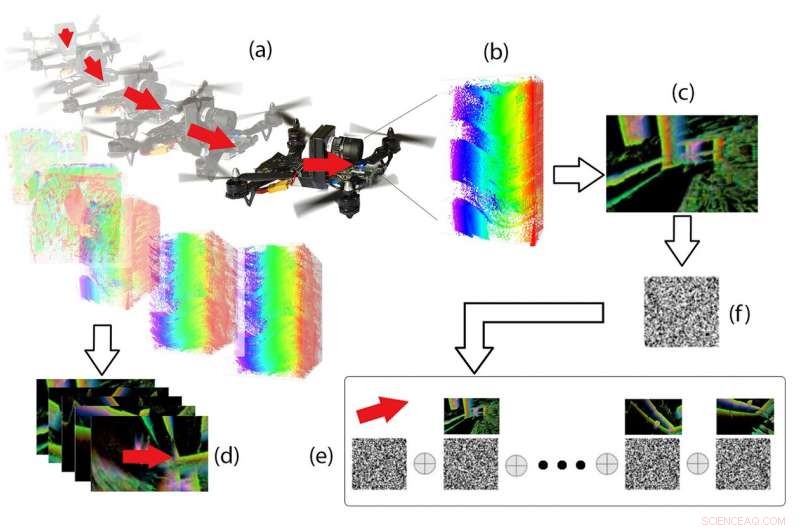
Pipeline hyperdimensionnel. A partir des données d'événement (b) enregistrées sur le DVS pendant le vol du drone (a), des « images d'événements » (c) et des vecteurs de mouvement 3D (d) sont calculés, et les deux sont codés sous forme de vecteurs binaires et combinés en mémoire via des opérations vectorielles spéciales (e). Étant donné une nouvelle image d'événement (f), le mouvement 3D associé peut être rappelé de la mémoire. Crédit :Groupe Perception et Robotique, Université du Maryland.
Un cadre hyperdimensionnel peut transformer n'importe quelle séquence d'"instants" en nouveaux VHB, et regrouper les HBV existants, tous dans la même longueur de vecteur. C'est un moyen naturel de créer des "souvenirs" sémantiquement significatifs et informés. L'encodage de plus en plus d'informations conduit à son tour à des vecteurs « historiques » et à la capacité de se souvenir. Les signaux deviennent des vecteurs, l'indexation se traduit en mémoire, et l'apprentissage se fait par le regroupement.
Les souvenirs du robot de ce qu'il a ressenti et fait dans le passé pourraient le conduire à s'attendre à une perception future et à influencer ses actions futures. Cette perception active permettrait au robot de devenir plus autonome et mieux en mesure d'accomplir des tâches.
"Un percepteur actif sait pourquoi il veut sentir, puis choisit ce qu'il faut percevoir, et détermine comment, quand et où atteindre la perception, " dit Aloimonos. " Il sélectionne et fixe des scènes, moments dans le temps, et épisodes. Puis il aligne ses mécanismes, capteurs, et d'autres composants pour agir sur ce qu'il veut voir, et sélectionne des points de vue à partir desquels capturer au mieux ce qu'il entend."
"Notre cadre hyperdimensionnel peut répondre à chacun de ces objectifs."