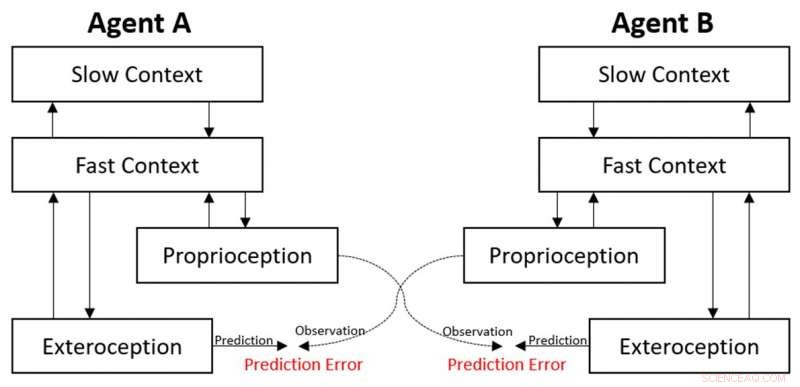
Le modèle développé par les chercheurs. Crédit :Hwang, Wirkuttis &Tani.
Des chercheurs de l'Institut des sciences et technologies d'Okinawa ont récemment proposé une approche de neurorobotique qui pourrait aider au développement de robots dotés de capacités de communication avancées. Leur approche, présenté dans un article pré-publié sur arXiv, est basé sur deux caractéristiques clés :la dynamique neuronale stochastique et la minimisation des erreurs de prédiction (PEM).
"Notre recherche se concentre largement sur la construction de robots basés sur les principes clés du cerveau, " Jungsik Hwang, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Dans cette étude, nous nous sommes concentrés sur le principe de minimisation des erreurs de prédiction (PEM). L'idée principale est que le cerveau est une machine à prédiction, faire des prédictions de manière cohérente et minimiser les erreurs de prédiction lorsqu'une prédiction diffère des observations. Cette théorie a été largement appliquée pour expliquer de nombreux aspects des comportements cognitifs. Dans cette étude, nous avons essayé d'examiner si ce principe peut s'appliquer à une situation sociale.
Dans les années récentes, les chercheurs ont mené de nombreuses études visant à reproduire artificiellement les capacités de communication innées de nombreux animaux, y compris les humains. Bien que bon nombre de ces études aient obtenu des résultats prometteurs, la plupart des solutions existantes n'atteignent pas une précision comparable à l'homme.
"L'une des tâches difficiles pour un robot doté de capacités de communication est de reconnaître l'intention d'autrui derrière le comportement observé, " expliqua Hwang. " Une approche courante pour résoudre ce problème est de le considérer comme une tâche de classification. L'objectif devient alors d'obtenir l'étiquette correcte (intention de l'utilisateur) avec une observation donnée (comportement de l'utilisateur) en utilisant le classifieur. Ces jours, le choix populaire pour de tels classificateurs est les modèles de réseaux de neurones profonds, tels que les réseaux de neurones convolutifs (CNN) et la mémoire à long court terme (LSTM)."

Crédit :Hwang, Wirkuttis &Tani.
Dans leur étude, Hwang et ses collègues ont proposé une approche différente pour résoudre ce problème basée sur la dynamique neuronale stochastique et la PEM. Les chercheurs ont appliqué leur approche à deux petits robots humanoïdes, appelé ROBOTIS OP2, et l'a testé dans différentes situations impliquant des interactions homme-robot et robot-robot.
« En utilisant notre approche, le robot fait systématiquement des prédictions sur le comportement de l'agent avec lequel il interagit, " dit Hwang. " Quand une prédiction est différente de leur observation, le robot met à jour sa croyance afin que la prédiction correcte puisse être faite (c'est-à-dire en minimisant l'erreur de prédiction). Par conséquent, dans cette approche, la reconnaissance de l'intention n'est pas une tâche de classification, mais un processus actif qui implique la mise à jour des « croyances » pour comprendre ce qui s'est passé dans un passé récent. En termes d'apprentissage automatique, cela peut être considéré comme une sorte d'apprentissage en ligne."
Dans des évaluations préliminaires utilisant des robots humanoïdes, les chercheurs ont découvert que la capacité de prédire le comportement des autres et de minimiser les erreurs de prédiction jouait un rôle clé dans les situations sociales. En utilisant leur approche, les robots étaient capables d'imiter les actions des agents avec lesquels ils interagissaient; un utilisateur humain dans les paramètres HRI (interaction homme-robot) et un autre robot dans les paramètres RRI (interaction robot-robot). Lorsque leur approche n'a pas été appliquée aux robots, d'autre part, les interactions des robots avec d'autres agents étaient marquées par des schémas banals et des comportements répétitifs.

Crédit :Hwang, Wirkuttis &Tani.
« Par le biais du mécanisme PEM, le robot peut non seulement s'adapter rapidement à un environnement changeant, mais aussi prévoir ce qui va se passer dans le futur, " a expliqué Hwang. " Cette méthode peut donc être appliquée à d'autres services d'intelligence ambiante dans lesquels l'IA fait systématiquement des prédictions sur les utilisateurs et s'y adapte, ou même fournit de manière proactive des suggestions basées sur des observations passées."
À l'avenir, l'approche développée par Hwang et ses collègues pourrait éclairer le développement de robots dotés de meilleures capacités de communication. De façon intéressante, les chercheurs ont également observé que lorsque deux robots interagissaient l'un avec l'autre en utilisant leur approche, des modèles de communication nouveaux et inhabituels ont émergé, suggérant que leur approche permet un type de communication plus avancé.
« Il existe encore de nombreuses pistes de recherche intéressantes qui peuvent être explorées dans ce cadre, " dit Hwang. " Par exemple, Je suis intéressé par un test de Turing gestuel dans lequel un utilisateur interagit avec un robot qui peut être contrôlé par une autre personne derrière le mur ou l'IA. Si l'on ne peut pas identifier qui fait fonctionner le robot, peut-on dire que le robot a l'intelligence d'interagir avec les gens ? Quels types de principes cérébraux seraient essentiels pour illustrer la ressemblance humaine dans de tels contextes sociaux ? Ce sont des questions que j'aimerais explorer à l'avenir."
© 2019 Réseau Science X