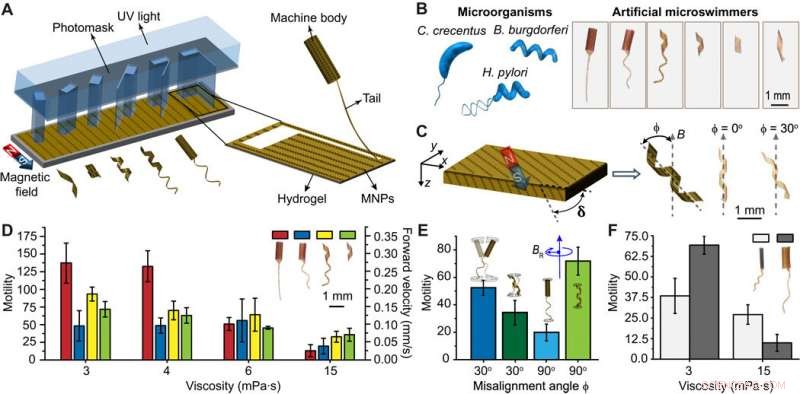
(A) Une approche kirigami pour construire des micronageurs souples personnalisés en masse grâce à une photolithographie en une seule étape. UV, ultra-violet. (B) Illustration schématique des bactéries inspirées de cette étude et des images optiques des micronageurs artificiels conçus. (C) L'alignement hors plan (δ ≠ 0) des MNP conduit à un angle de désalignement non nul (ϕ). Les images optiques montrant deux nageurs avec des formes identiques et variant sont affichées. (D) Une comparaison de la motilité des micronageurs nageant dans des fluides de viscosités différentes. (E) Motilité des micronageurs tubulaires flagellés et des micronageurs hélicoïdaux codés avec deux anisotropies magnétiques différentes tournant dans une solution avec une viscosité de 3 mPa.s. (F) Effet de la taille du corps sur la motilité des micronageurs tubulaires. Les nageurs ont été entraînés à 2 Hz avec une intensité de champ de 20 mT dans toutes les expériences, sauf indication contraire. Tous les graphiques à barres représentent la moyenne ± SEM (n =6 mesures pour chaque micronageur et trois nageurs différents testés par condition). Crédit :Avancées scientifiques, doi:10.1126/sciadv.aau1532
Les bactéries présentent une plasticité remarquable en exploitant la mécanique en réponse à des conditions physiques et chimiques localement changeantes. Des structures conformes aident généralement le comportement de leurs taxis à naviguer dans des environnements complexes et structurés. Les mécanismes microbiologiques bioinspirés contiennent des architectures rationnellement conçues capables de déformation non linéaire pour introduire l'autonomie dans les appareils à petite échelle.
Dans une étude récente, H.W. Huang et ses collègues des départements de génie mécanique, mathématiques appliquées et physique théorique, ont analysé les effets des forces hydrodynamiques et de la rhéologie de l'environnement local sur la nage à faible nombre de Reynolds. Dans le travail, ils ont identifié les défis et les avantages de l'utilisation du couplage élasto-hydrodynamique dans la locomotion pour développer une suite de machines permettant de construire des microrobots non attachés à mobilité autorégulée. Les scientifiques ont pu démontrer le couplage entre les propriétés structurelles et magnétiques des micronageurs artificiels avec les propriétés dynamiques du fluide, lors de la locomotion adaptative en l'absence de capteurs embarqués. Les résultats sont maintenant publiés dans Avancées scientifiques .
Les micro-organismes contiennent diverses machines permettant au mouvement moléculaire de naviguer efficacement dans des environnements complexes et des niches écologiques. Chez les bactéries, la nage résulte des interactions mécaniques entre les flagelles actionnés, corps cellulaire et la traînée générée par le flux. Les forces visqueuses à faible nombre de Reynolds sont responsables de la traînée hydrodynamique, qui à son tour dépend de la forme des objets en mouvement.
Pour optimiser leur motricité, les bactéries peuvent adopter des formes et des tailles alternatives au cours de leur cycle de vie. En plus de changer la forme du corps, les bactéries peuvent également utiliser des systèmes de propulsion pour un mouvement avancé dans des environnements complexes. Par exemple, en pliant un crochet, Caulobacter crescentus peut améliorer la motilité, tandis que Vibrio alginolyticus peut surpasser Escherichia coli multi-flagellé dans les gradients nutritifs grimpants en raison de l'instabilité du flambement flagellaire. Par ailleurs, Shewanella putrefaciens peut échapper aux pièges physiques via une transition polymorphe dans le filament flagellaire.
Des nageurs artificiels microscopiques que les chercheurs ont développés via la micro-ingénierie bioinspirée pour se déplacer dans les fluides corporels, à travers les barrières biologiques et l'accès à des sites éloignés de la maladie pourraient révolutionner les thérapies ciblées. Des travaux pionniers dans le domaine ont déjà démontré la faisabilité d'imiter le flagelle procaryote ou eucaryote pour construire des micronageurs à commande magnétique avec un mouvement non réciproque. Cependant, contrairement aux cellules vivantes, ces dispositifs mécaniques ne peuvent pas détecter leur environnement local ou s'adapter aux changements des conditions physiques. Le contrôle des matériaux artificiels peut ouvrir la voie à la construction d'éléments accordables, des solutions d'ingénierie durables et robustes telles que des dispositifs robotiques biohybrides autonomes.
Dans le travail present, Huong et al. introduire une méthode simple et polyvalente basée sur la fabrication de matériaux pour concevoir des micromachines souples à commande magnétique. Le concept est basé sur un système multicorps reconfigurable en 3D conçu à partir d'une monocouche d'hydrogel nanocomposite. Dans des travaux antérieurs menés par le même groupe de recherche, Huang et al. a détaillé la forme et le profil de magnétisation des micromachines auto-pliées dans lesquelles les structures pourraient être programmées indépendamment en incorporant des nanoparticules magnétiques (MNP) dans des couches d'hydrogel à motifs.
Pour cette étude, les scientifiques ont présenté un ensemble de stratégies de conception pour autoréguler le mouvement et la maniabilité via l'interaction entre visqueux, élastique, forces magnétiques et osmotiques. Huang et al. a démontré que le corps reconfigurable pouvait se transformer en continu en fonction du fluide environnant, permettant le mouvement à travers les étranglements pour une meilleure performance de la locomotive. Ils ont montré que le couplage élasto-hydrodynamique dans les changements de forme et les adaptations de la démarche pourrait permettre aux microbots de naviguer à l'intérieur obstrué, environnements hétérogènes et dynamiques.
Rôle du plan corporel sur la maniabilité. Les micronageurs hélicoïdaux ont montré les meilleures performances comme prévu car ils ne traitent pas la coordination du corps et de la queue. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aau1532.
Huang et al. a conçu les micronageurs doux en utilisant la locomotion bio-inspirée avec une variante de l'origami connue sous le nom de kirigami. Les microstructures 3D conformes ont été conçues à partir d'un gel thermoréactif renforcé de MNP (nanoparticules magnétiques). Pendant le processus de fabrication, les scientifiques ont initié la découpe par photolithographie et le pliage lors de l'hydratation de la couche polymérisée. La distribution non uniforme des MNP le long de la direction de l'épaisseur a permis la formation de deux couches distinctes d'hydrogels avec des rapports de gonflement significativement différents.
Les chercheurs se sont concentrés sur trois configurations de micro-organismes, y compris C. crescentus, Helicobacter pylori et Borrelia burgdorferi. Les bactéries nagent généralement en faisant tourner des filaments flagellaires ressemblant à des hélices qui s'étendent du corps cellulaire. Le biomimétisme du mouvement pourrait permettre à des micronageurs artificiels de se déplacer, si le moment magnétique de la machine était perpendiculaire à son grand axe. Cependant, les structures ressemblaient plutôt à des aiguilles de boussole, en alignant leur grand axe sur la direction du champ magnétique externe. Pour surmonter cette limite, Huang et al ont fait varier l'alignement hors plan des MNP innés dans le matériau, tout en maintenant l'alignement des particules dans le plan constant.
Enregistrement dynamique du profil de magnétisation. Les nanocomposites magnétiquement renforcés étaient dans une direction autre que la direction d'alignement MNP. Le champ appliqué était significativement plus élevé que le champ magnétique appliqué pour aligner les particules lors de la fabrication des microbots. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aau1532.
Pour optimiser le mouvement à différentes viscosités, les microstructures ont acquis des allures différentes. Pour explorer systématiquement l'avantage potentiel de la diversité morphologique, Huong et al. construit des micronageurs avec différents plans de corps et les actionne dans des fluides de viscosité variable. Les scientifiques ont pu concevoir des micronageurs qui suivaient des trajectoires hélicoïdales 3D en coordonnant leur morphologie avec leur profil de magnétisation. Dans toutes les expériences, le nombre de Reynolds allait de 10 -2 à 10 -4 ; pour indiquer la nage sous flux laminaire.
Dans une solution de saccharose de même viscosité que le sang, les micronageurs flagellés avec une queue plane flexible et un corps tubulaire se sont déplacés plus rapidement par mouvement hélicoïdal par rapport aux autres prototypes. Les micronageurs flagellés ont bénéficié à la fois du mouvement hélicoïdal et du mouvement en tire-bouchon, tandis que les micronageurs hélicoïdaux effectuaient un mouvement de tire-bouchon. Cependant, pendant l'augmentation de la viscosité, le mouvement de tous les micronageurs a diminué, mais la chute était la plus élevée pour les micronageurs flagellés avec une queue plane. À une viscosité plus élevée, Huong et al ont observé que les micronageurs hélicoïdaux étaient les plus rapides, car le seul mouvement pertinent dans les conditions était le mouvement du tire-bouchon.
Parallèlement au mouvement, la capacité de réguler le mouvement (maniabilité) joue un rôle clé chez les bactéries pour détecter et détecter les gradients de nutriments. Les scientifiques ont testé la maniabilité des micronageurs artificiels en induisant des déviations de l'angle de lacet (rotation) pendant la nage. Un micro-nageur très maniable pourrait changer sa direction de mouvement rapidement avec un petit changement dans le signal de commande. Lors de perturbations plus fortes (rotation en lacet de 45 degrés), la géométrie du corps et de la queue a joué un rôle important dans la réponse des micronageurs conformes. Structurellement, le corps a répondu au signal de commande avant la queue, puisque la magnétisation du corps était plus élevée. Les nageurs avec une queue plane ont montré une plus grande susceptibilité aux instabilités, une queue hélicoïdale pourrait comparativement contribuer à la stabilisation en raison de la rigidité plus élevée de la géométrie hélicoïdale.
Adaptation de forme dans des canaux courbes sous flux axial avec un débit de 2 ml/min. La déformation observée était élastique, et les nageurs ont complètement récupéré leur forme après avoir traversé le coin sous le flux appliqué extérieurement avec un débit de 2 ml/min. L'augmentation de la rigidité des filaments réduit la déformation et conduit à l'obstruction du canal. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aau1532. 
Huong et ses collègues ont déterminé l'efficacité de propulsion des nageurs dociles en couplant entre les forces magnétiques, flexibilité du filament et traînée visqueuse. Ils ont étudié les propriétés élasto-hydrodynamiques pour déclencher une transition de marche en réponse à un changement de viscosité. Les scientifiques ont observé l'enroulement de la queue du microbot à une viscosité et une fréquence plus élevées. La transition ou transformation morphologique observée, contribué au mouvement du tire-bouchon pour une meilleure motilité des microbots.

Adaptation de la marche des micronageurs tubulaires avec une queue élastique. Les propriétés élastohydrodynamiques peuvent être exploitées pour déclencher une transition de marche en réponse aux changements de viscosité faible et élevée. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aau1532.
Basé sur des stratégies globales de mouvement et de maniabilité, les données obtenues dans l'étude ont révélé qu'un corps tubulaire avec une queue plane était préférable pour nager à faible viscosité. Relativement, une morphologie hélicoïdale pourrait mieux fonctionner à une viscosité plus élevée. Huong et al. construit un micronageur reconfigurable magnétiquement pour subir une transformation de forme entre les deux configurations en fonction des conditions externes. Les micronageurs programmés pourraient changer de forme pour une vitesse vers l'avant soutenue et une maniabilité améliorée malgré l'augmentation des forces visqueuses.
De cette façon, des analyses minutieuses des performances de natation à différentes viscosités ont fourni une ligne directrice pour construire une seule micromachine. Pour résoudre le problème de navigation à l'échelle micro/nano, Huong et al. réduit le nombre d'éléments à contrôler pour les avantages de vitesse qui en résultent, polyvalence et coût. Les microrobots peuvent être fabriqués via des méthodes à haut débit et évolutives pour ouvrir les portes du développement d'une gamme de microrobots souples pour des applications médicales et industrielles.
© 2019 Réseau Science X