Prises de précision (gauche) et de puissance (droite) générées par le planificateur de prises. Crédit :Lu &Hermans.
Des chercheurs de l'Université de l'Utah ont récemment développé un planificateur de préhension probabiliste qui peut modéliser explicitement les types de préhension pour planifier des préhensions de précision et de puissance de haute qualité en temps réel. Leur approche d'apprentissage supervisé, décrit dans un article prépublié sur arXiv, peut planifier efficacement les prises de puissance et de précision pour un objet donné.
Pour les humains et les robots, différentes tâches de manipulation nécessitent différents types de prises. Par exemple, tenant un outil lourd, comme un marteau, nécessite une prise de force à plusieurs doigts qui offre de la stabilité, tout en tenant un stylo nécessite une préhension de précision à plusieurs doigts, car cela peut conférer de la dextérité à l'objet.
Lors du test de leur approche précédente pour saisir la planification, l'équipe de chercheurs de l'Université de l'Utah a remarqué qu'elle générait presque toujours des prises de force dans lesquelles la main du robot s'enroule autour d'un objet, avec de grandes zones de contact entre sa main et l'objet. Ces prises sont utiles pour effectuer une variété de tâches robotiques, comme ramasser des objets ailleurs dans la pièce, pourtant, ils sont inutiles lors de l'exécution de tâches de manipulation à la main.
"Pensez à déplacer un pinceau ou un scalpel que vous tenez du bout des doigts, " Tucker Hermans, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Ce genre de tâches nécessite des prises de précision, où le robot tient l'objet du bout des doigts. En regardant la littérature, nous avons vu que les méthodes existantes tendent à n'engendrer qu'un seul type d'appréhension, soit la précision, soit la puissance. Nous avons donc entrepris de créer une approche de synthèse de saisie qui peut gérer les deux. Par ici, notre robot peut utiliser des prises électriques pour ramasser et placer de manière stable des objets qu'il veut déplacer, mais la précision saisit lorsqu'elle doit effectuer des tâches de manipulation à la main."
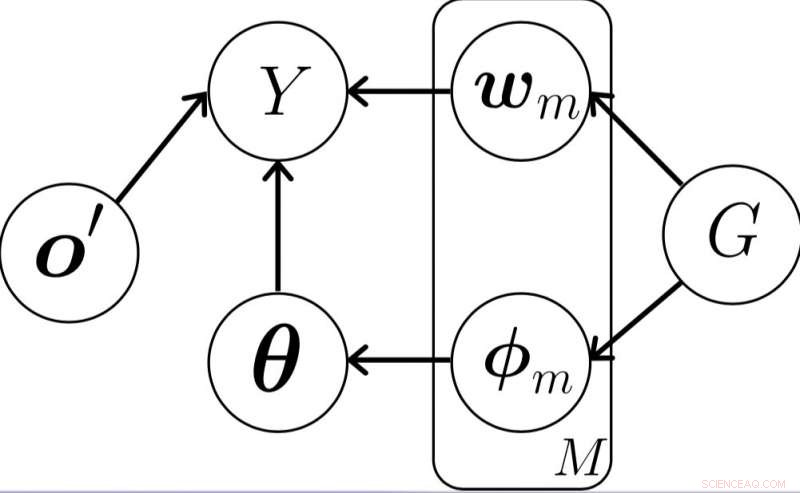
Le modèle graphique probabiliste de type saisie proposé. Crédit :Lu &Hermans.
Dans l'approche pour saisir la planification conçue par Hermans et son collègue Qingkai Lu, un robot apprend à prédire le succès de la saisie à partir d'expériences passées. Le robot tente différents types de saisies sur différents objets, enregistrer lesquelles d'entre elles ont réussi et lesquelles ont échoué. Ces données sont ensuite utilisées pour entraîner un classificateur à prédire si une saisie donnée réussira ou non.
"Le classificateur prend en entrée une image de profondeur de l'objet et la configuration de préhension choisie (c'est-à-dire où mettre la main et comment façonner les doigts), " expliqua Hermans. " En plus de prédire le succès, le classificateur rapporte à quel point il est confiant que la saisie réussira sur une échelle de zéro à un. Lorsqu'on lui présente un objet à saisir, le robot planifie une prise en recherchant différentes prises possibles et en sélectionnant la prise pour laquelle le classificateur prédit la plus grande confiance dans la réussite."
L'approche d'apprentissage supervisé développée par Hermans et Lu permet de planifier différents types de saisies pour des objets inédits, même lorsque seules des informations visuelles partielles sont disponibles. Leur méthode pourrait être la première méthode de planification des prises à planifier explicitement à la fois les prises de puissance et de précision.
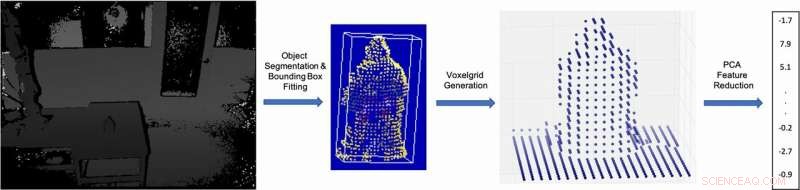
Illustration du processus d'extraction de caractéristiques visuelles. Crédit :Lu &Hermans.

Exemple d'image RVB générée par la caméra Kinect2 montrant le robot et l'objet de type Lego sur la table. Crédit :Lu &Hermans.
Les chercheurs ont évalué leur modèle et l'ont comparé à un modèle qui ne code pas le type de saisie. Leurs résultats suggèrent que la modélisation du type de saisie peut améliorer le taux de réussite des saisies générées, avec leur modèle surpassant l'autre méthode.
"Nous pensons que nos résultats sont importants de deux manières significatives, " dit Hermans. " Premièrement, notre approche proposée permet à un robot de sélectionner explicitement le type de prise qu'il désire, résoudre le problème que nous nous sommes fixés. Seconde, et potentiellement plus important, l'ajout de ces connaissances de type saisie dans le système améliore en fait la capacité du robot à saisir avec succès des objets. Ainsi, même si vous ne voulez qu'un seul type de prise, dire que le pouvoir saisit, il est toujours utile de savoir que les saisies de précision existent lors de l'apprentissage de la saisie."
L'approche conçue par Hermans et Lu pourrait aider au développement de robots capables de générer un ensemble diversifié de prises. Cela permettrait à terme à ces robots d'accomplir une plus grande variété de tâches, qui impliquent différents types de manipulation d'objets.

Exemples de saisies de précision et de puissance réussies générées par la nouvelle approche de modélisation de type saisie pour la planification des saisies. Les deux premières rangées sont des prises de précision. Les deux rangées du bas sont des prises de force. Crédit :Lu &Hermans.

Prises de précision (gauche) et de puissance (droite) générées par le nouveau planificateur de prises. Crédit :Lu &Hermans.
"Nous envisageons maintenant deux prolongements directs de ce travail, " dit Hermans. " Premièrement, nous souhaitons examiner les effets de la modélisation de plus de types de saisies, par exemple, distinguer des sous-types de préhensions de précision caractérisées par différents segments du doigt entrant en contact avec l'objet. Pour y parvenir, nous prévoyons d'ajouter de la peau à la main du robot afin de permettre la détection automatique de l'endroit où les contacts sont établis. Seconde, nous souhaitons incorporer plus d'informations pour aider à sélectionner automatiquement le type de prise approprié en fonction d'une tâche demandée. Par exemple, comment le robot peut-il décider automatiquement qu'il doit utiliser une prise de précision pour créer une peinture, sans que l'opérateur le dise ? »
© 2019 Réseau Science X