« Precision Jumping Limits from Flight-phase Control in Salto-1P » est le titre académique d'un article qui devrait néanmoins ravir ceux qui s'intéressent au mouvement robotique.
Justin Yim et Ronald Fearing, Département de génie électrique et informatique, Université de Californie, Berkeley, sont les auteurs de l'article. Leur travail a été présenté plus tôt ce mois-ci à l'IROS 2018 à Madrid.
Il s'agit d'un robot monopédale, appelé Salto-1P. Les notes vidéo décrivaient en outre Salto-1P comme un petit robot sauteur monopédale capable de sauter en continu à haute puissance.
Pourquoi l'appellent-ils Salto ? James Holloway dans Nouvel Atlas satisfait les curieux. La locomotion saltatoriale sur les obstacles du terrain est la réponse, quoi que "saltatorial" signifie. Holloway et Google ont également aidé.
Saltatorium signifie adapté au saut. Saltus est un mot latin pour saut.
Réellement, regarder un robot unijambiste sauter dans tous les sens dans une frénésie non-stop est étrangement fascinant. Cependant, les chercheurs de l'UC Berkeley avaient plus de mouvements ciblés en tête. L'équipe est déterminée à fournir un robot capable de sauter et de savoir où il atterrira ensuite.
"Deux petites hélices permettent au robot de vriller dans les airs, mais toute la force motrice vient de la seule jambe, " mentionné Hackaday .
On peut comprendre Spectre IEEE en choisissant de l'appeler un « pogo stick robotique » (mais ce n'est pas l'histoire ; il s'agit plutôt de ce que le bâton peut maintenant accomplir). Les chercheurs n'étaient pas simplement intéressés par l'idée d'une hyper machine qui se jette sur elle-même.
TechCrunch a écrit à propos de ses capacités :(1) il peut surveiller une surface pour une cible, a écrit John Biggs, et (2) « survoler essentiellement l'endroit où il doit atterrir à l'aide d'hélices intégrées ».
Pourquoi leur travail récent est important :tout tourne autour du contrôleur, qu'ils ont amélioré pour améliorer la précision à l'atterrissage - "un exploit qui était presque impossible avec le système de contrôleur précédent, " a déclaré Biggs.
Evan Ackerman a expliqué que le matériel de Salto-1P est le même que l'année dernière :une jambe élastique actionnée pour le houblon, "une queue inertielle qui tourne pour contrôler le pas, et un demi quadricoptère pour contrôler le lacet et le roulis." Mais cette année, tout est question de contrôleur.
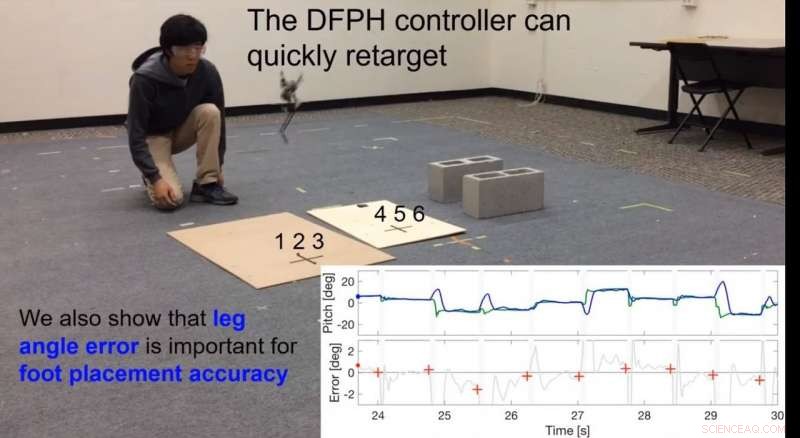
L'objectif de l'équipe pour Salto-1P était un meilleur contrôleur pour faire des choses qui nécessitent un placement précis des pieds. Ackerman a déclaré que « des comportements encore plus agressifs, comme sauter entre les murs, implique toute une séquence de sauts qui doivent tous être précis, car un seul saut imprécis fera probablement tomber le robot et se brisera en morceaux."
Dans leur papier, les auteurs ont discuté de leur contrôle de saut de placement de pied mort. Qu'est-ce que ça veut dire? Bien, ils ont affaire à "un nouvel algorithme de contrôle qui peut faire atterrir le pied de Salto-1P à des endroits particuliers du sol, comme sauter sur des tremplins ou jouer à la marelle à une jambe". Ils appellent cela "le contrôle du saut de placement du pied mort".
Holloway a dit Nouvel Atlas lecteurs sur l'approche de l'équipe. "Le contrôleur utilise ce que l'on appelle en mathématiques une approximation de la série de Taylor, qui peut être utilisé pour approximer les réponses à des équations complexes, y compris les forces gouvernantes agissant sur un point.
Résultat final :un robot conçu de telle sorte qu'il ne peut pas simplement sauter mais sauter entre des endroits désignés, "comme s'il sautait de tremplin en tremplin ou jouait à la marelle." Il peut sauter par terre, ou entre des objets de hauteur croissante, dit Holloway.
Leur liste des prochains travaux sur ce robot sauteur comprend l'étude des effets d'un terrain non rigide ou en pente sur les performances de saut et la stratégie de contrôle. Aussi, selon Ackerman, "Nous avons parlé avec Justin Yim à IROS, qui nous a dit qu'il travaillait à augmenter encore plus la précision de saut de Salto-1P, tout en le sevrant de la localisation externe et des systèmes informatiques qui le maintiennent confiné à l'intérieur."
© 2018 Tech Xplore