Une célèbre vidéo virale sur le DARPA Robotics Challenge montre toutes sortes de robots humanoïdes qui tombent maladroitement. Le mouvement bipède est plutôt instable, ce qui n'est pas seulement un problème pour un robot essayant d'accomplir sa tâche, mais aussi parce qu'une chute peut endommager une machine très coûteuse.
Les roboticiens du monde entier s'attaquent à ce problème de multiples façons. Alors que certains cherchent à ajouter une série d'étapes correctives après qu'un robot soit déséquilibré, un peu comme une personne qui trébuche après avoir trébuché, Kris Hauser souhaite que les robots puissent utiliser l'environnement qui les entoure.
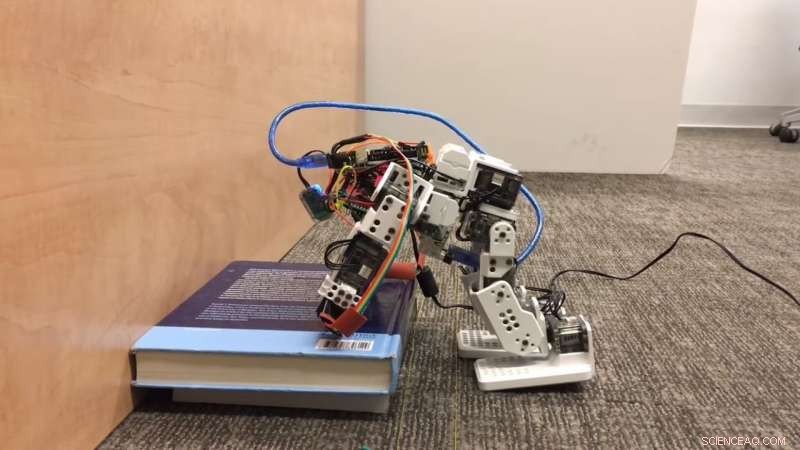
"Si une personne est poussée vers un mur ou un rail, ils pourront utiliser cette surface pour se tenir debout avec leurs mains. Nous voulons que les robots puissent faire la même chose, " a déclaré Kris Hauser, professeur agrégé de génie électrique et informatique et de génie mécanique et science des matériaux à Duke. "Nous pensons être le seul groupe de recherche à travailler pour qu'un robot choisisse dynamiquement où placer ses mains pour éviter de tomber."
Bien que de telles décisions et actions soient une seconde nature pour nous, les programmer dans les réflexes d'un robot est trompeusement difficile. Pour rationaliser le processus et gagner du temps de calcul, Hauser programme le logiciel pour qu'il se concentre uniquement sur les articulations de la hanche et de l'épaule du robot.
Tant que le robot ne se tord pas en tombant, cela ne crée que trois angles que l'algorithme de stabilisation doit prendre en compte :le pied à la hanche, la hanche à l'épaule, et l'épaule à la main. Le robot doit identifier les surfaces proches à portée, puis calculer rapidement la meilleure combinaison d'angles pour se rattraper. La solution finale minimise l'impact lorsque les mains du robot entrent en contact, et minimise également le risque que ses mains ou ses pieds glissent. L'algorithme prend sa meilleure estimation, puis l'optimise progressivement à l'aide d'une méthode appelée prise de vue directe.
Dans son état actuel, le robot reçoit des informations sur son environnement et ne peut pas naviguer seul. Mais dans un futur proche, Hauser prévoit de passer à un robot plus grand avec ses propres capteurs de caméra pour lui permettre de voir son environnement.
"J'espère que d'ici la fin de l'année, nous devrions faire des expériences avec le robot fonctionnant réellement dans un parcours d'obstacles en direct, " a déclaré Hauser. " Ensuite, nous essaierons de faire en sorte que le robot cartographie dynamiquement ce qui l'entoure et explique comment se protéger contre les chutes dans des environnements arbitraires. "