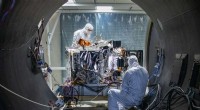
NUI est descendu dans la mer Égée avant de plonger à une profondeur de 500 mètres pour explorer le volcan Kolumbo. Crédit :Evan Lubofsky/Institut océanographique de Woods Hole
le robot de WHOI, Néréide sous la glace (NUI), échantillonne une parcelle de sédiments du sol riche en minéraux du volcan Kolumbo au large de l'île de Santorin, Grèce. Il s'agit du premier échantillon automatisé connu prélevé par un robot dans l'océan.
Un véhicule hybride télécommandé développé par la Woods Hole Oceanographic Institution (WHOI) a prélevé le premier échantillon automatisé connu effectué par un bras robotique dans l'océan. Le mois dernier, une équipe internationale de chercheurs a utilisé l'un des robots sous-marins de WHOI, Néréide sous la glace (NUI), pour explorer le volcan Kolumbo, un volcan sous-marin actif au large de la célèbre île de Santorin en Grèce.
"Pour un véhicule, prélever un échantillon sans pilote au volant, c'était un énorme pas en avant, " dit Rich Camilli, un scientifique associé à WHOI dirigeant le développement de la technologie d'automatisation dans le cadre du programme de recherche interdisciplinaire de la NASA Planetary Science and Technology from Analog Research (PSTAR). "L'un de nos objectifs était de lancer le joystick, et c'est exactement ce que nous avons pu faire."
Comme pour les voitures autonomes, confier le volant à un algorithme informatique peut être déstabilisant. Il en va de même pour les robots océaniques, surtout lorsqu'ils doivent travailler dans des environnements difficiles et dangereux. Camilli faisait partie d'une équipe internationale de chercheurs lors d'une expédition visant à découvrir la vie dans le dur, environnement chargé de produits chimiques de Kolumbo, et également explorer dans quelle mesure les scientifiques peuvent céder les commandes aux robots océaniques et leur permettre d'explorer sans intervention humaine.
Légèrement plus petit qu'une Smart Car, NUI était équipé d'un logiciel de planification automatisé basé sur l'intelligence artificielle (IA), y compris un planificateur nommé "Spock", qui a permis au ROV de décider quels sites visiter dans le volcan et de prélever des échantillons de manière autonome.
Gédéon Billings, un étudiant invité de l'Université du Michigan dont la recherche de thèse porte sur les technologies automatisées, a eu l'honneur d'utiliser son code pour collecter le tout premier échantillon automatisé, qui était d'un morceau de sédiment du fond marin riche en minéraux de Kolumbo. Il a donné un ordre au manipulateur autonome et, quelques instants plus tard, un tuyau de prélèvement d'échantillons fixé au bras robotique s'étendait jusqu'à l'emplacement précis de l'échantillon et aspirait la saleté.
Billings dit que ce niveau d'automatisation sera important pour la NASA alors qu'elle envisage de développer des technologies pour explorer les mondes océaniques au-delà de notre système solaire. "Si nous avons cette grande vision d'envoyer des robots dans des endroits comme Europe et Encelade [les lunes de Jupiter et de Saturne, respectivement], ils devront finalement travailler de manière autonome comme cela et sans l'aide d'un pilote, " il dit.
Avancer, Camilli continuera à travailler avec Billings et ses collègues de l'Université du Michigan, ainsi que des chercheurs du Centre australien de robotique de terrain, Massachusetts Institute of Technology, et le Toyota Technological Institute de Chicago pour faire avancer la technologie d'automatisation. Le travail comprendra la formation de robots océaniques pour voir comme des pilotes de ROV en utilisant la technologie de « suivi du regard », et la construction d'une interface robuste en langage humain afin que les scientifiques puissent parler directement aux robots sans intermédiaire pilote.
« Nous pouvons éventuellement voir un réseau de robots océaniques cognitifs où il y a une intelligence partagée couvrant toute une flotte, avec chaque véhicule travaillant en coopération comme des abeilles dans une ruche, " dit Camilli. " Cela ira bien au-delà de la perte du joystick. "