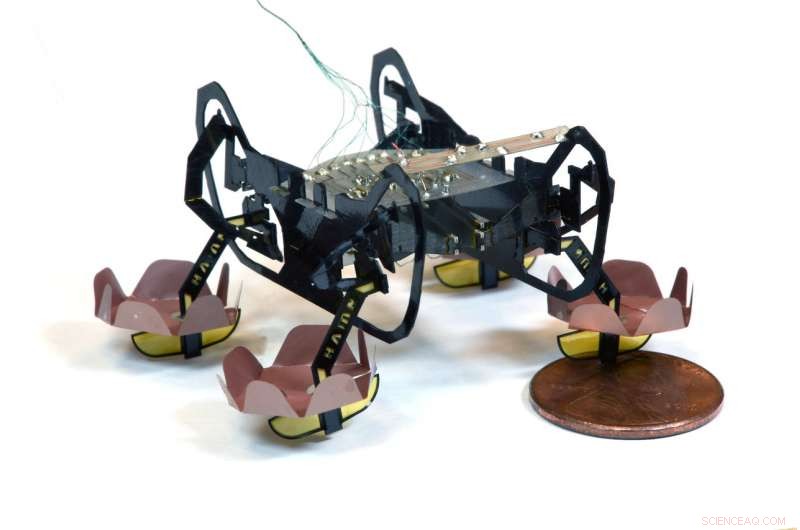
La prochaine génération de microrobot ambulatoire de Harvard (HAMR) peut marcher sur terre, nager à la surface de l'eau, et marcher sous l'eau, ouvrant de nouveaux environnements à explorer pour ce petit bot. Crédits :Yufeng Chen, Neel Doshi, et Benjamin Goldberg/Université Harvard
Dans la nature, les cafards peuvent survivre sous l'eau jusqu'à 30 minutes. Maintenant, un cafard robotisé peut faire encore mieux. Microrobot ambulatoire de Harvard, connu sous le nom de HAMR, peut marcher sur terre, nager à la surface de l'eau, et marcher sous l'eau aussi longtemps que nécessaire, ouvrant de nouveaux environnements à explorer pour ce petit bot.
Ce HAMR de nouvelle génération utilise des repose-pieds multifonctionnels qui reposent sur la tension superficielle et la flottabilité induite par la tension superficielle lorsque le HAMR doit nager, mais peuvent également appliquer une tension pour briser la surface de l'eau lorsque le HAMR doit couler. Ce processus est appelé électromouillage, qui est la réduction de l'angle de contact entre un matériau et la surface de l'eau sous une tension appliquée. Ce changement d'angle de contact permet aux objets de briser plus facilement la surface de l'eau.
Se déplacer à la surface de l'eau permet à un microrobot d'éviter les obstacles immergés et réduit la traînée. En utilisant quatre paires de rabats asymétriques et des allures de natation conçues sur mesure, Le robot HAMR nage à la surface de l'eau. Exploitant l'interaction instable entre les volets passifs du robot et l'eau environnante, le robot génère des allures de nage similaires à celles d'un coléoptère plongeur. Cela permet au robot de nager efficacement vers l'avant et de tourner.
"Cette recherche démontre que la microrobotique peut tirer parti de la physique à petite échelle - dans ce cas la tension superficielle - pour exécuter des fonctions et des capacités qui sont difficiles pour les robots plus gros, " a déclaré Kevin Chen, un boursier postdoctoral à la Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) et premier auteur de l'article.

Les coussinets multifonctionnels de HAMR reposent sur la tension superficielle et la flottabilité induite par la tension superficielle lorsque HAMR doit nager, mais peuvent également appliquer une tension pour briser la surface de l'eau lorsque HAMR doit couler. Crédits :Yufeng Chen, Neel Doshi, et Benjamin Goldberg/Université Harvard
Les recherches les plus récentes sont publiées dans la revue Communication Nature .
"La taille de HAMR est la clé de ses performances, " dit Neel Doshi, étudiant diplômé à SEAS et co-auteur de l'article. "Si c'était beaucoup plus gros, il serait difficile de soutenir le robot avec une tension superficielle et s'il était beaucoup plus petit, le robot pourrait ne pas être en mesure de générer suffisamment de force pour le casser."
HAMR pèse 1,65 grammes (environ autant qu'un gros trombone), peut transporter 1,44 gramme de charge utile supplémentaire sans couler et peut pagayer ses jambes avec une fréquence allant jusqu'à 10 Hz. Il est enduit de parylène pour l'empêcher de court-circuiter sous l'eau.
Une fois sous la surface de l'eau, HAMR utilise la même démarche pour marcher que sur la terre ferme et est tout aussi mobile. Pour retourner sur la terre ferme, HAMR fait face à un énorme défi depuis la cale de l'eau. Une force de tension de surface de l'eau qui est le double du poids du robot exerce une pression sur le robot, et de plus, le couple induit provoque une augmentation spectaculaire de la friction sur les pattes arrière du robot. Les chercheurs ont renforcé la transmission du robot et installé des coussinets souples sur les pattes avant du robot pour augmenter la capacité de charge utile et redistribuer la friction pendant l'escalade. Finalement, monter une pente modeste, le robot est capable de sortir de la cale de l'eau.
"Ce robot illustre bien certains des défis et opportunités des robots à petite échelle, " a déclaré l'auteur principal Robert Wood, Charles River Professeur d'ingénierie et de sciences appliquées à SEAS et membre principal du corps professoral du Harvard Wyss Institute for Biologically Inspired Engineering. "Le rétrécissement offre des opportunités de mobilité accrue, comme marcher à la surface de l'eau, mais aussi des défis, car les forces que nous tenons pour acquises à plus grande échelle peuvent commencer à dominer à la taille d'un insecte."
Prochain, les chercheurs espèrent améliorer encore la locomotion du HAMR et trouver un moyen de revenir à terre sans rampe, peut-être en incorporant des adhésifs inspirés du gecko ou des mécanismes de saut impulsif.