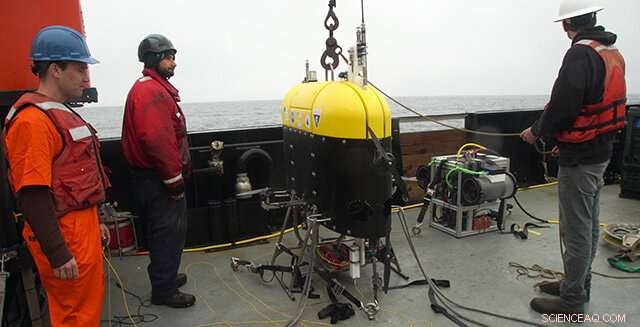
Les ingénieurs de la Woods Hole Oceanographic Institution et l'équipage du navire du R/V Rachel Carson se préparent à lancer le Mesobot dans la baie de Monterey. Le « SmartClump » de MBARI est en arrière-plan, en attente de déploiement. Crédit :Erik Olsen/OMSI
Fin juin, des chercheurs de MBARI ont rejoint des ingénieurs de la Woods Hole Oceanographic Institution (WHOI) pour tester une nouvelle race de robot sous-marin conçu pour ouvrir de nouvelles voies de recherche dans le domaine mésopélagique, également connue sous le nom de zone crépusculaire de l'océan. Ce véhicule, le Mésobot, originaire de WHOI et a été développé au cours des deux dernières années avec la contribution critique des scientifiques et des ingénieurs de MBARI, Université de Stanford, et l'Université du Texas Rio Grande Valley. Mesobot est spécialement conçu pour suivre et étudier les animaux qui nagent et dérivent jusqu'à 1, 000 mètres (3, 300 pieds) sous la surface jusqu'à 24 heures d'affilée.
Le Mesobot étendra et amplifiera les travaux antérieurs en milieu marin menés par MBARI et d'autres institutions. Depuis des décennies, Les chercheurs du MBARI dirigés par Bruce Robison et Steve Haddock et d'autres ont utilisé des véhicules télécommandés (ROV) pour étudier ces animaux pélagiques. Bien que rarement vu, ces créatures aident à soutenir les principales pêcheries telles que le thon et l'espadon, fournir de la nourriture à d'autres grands animaux tels que les requins et les baleines, et aider à réguler le climat de la Terre en déplaçant le carbone de la surface vers les eaux profondes.
Le projet est financé par la National Science Foundation, QUI, MBARI, et le projet Audacious hébergé à TED.
L'équipe multi-institutions a conçu le Mesobot pour être moins perturbateur pour les animaux des grands fonds que la plupart des ROV, l'équiper de caméras 4K à faible luminosité, des lumières rouges moins visibles pour les animaux dans le mésopélagique, et grand, hélices à rotation lente qui minimisent les perturbations dans l'eau. Un logiciel informatique de pointe permet également au véhicule de suivre des animaux ou des objets sous l'eau jusqu'à 24 heures d'affilée au cours de leur migration verticale quotidienne.

Cette photo montre le Mesobot traquant un animal marin simulé (objet blanc sur ficelle) dans le bassin d'essai de MBARI. Crédit :WHOI/ Erik Olsen
Le Mesobot est un hybride entre un ROV, qui est alimenté et contrôlé à l'aide d'une longe attachée à un navire de surface, et un véhicule sous-marin autonome (AUV), qui est programmé à la surface et fonctionne sans intervention humaine sous l'eau.
Au début de chaque plongée, les opérateurs contrôlent Mesobot depuis la surface comme un ROV, à l'aide d'une fine attache en fibre optique. Les chercheurs relâchent ensuite l'attache et la remontent sur le navire, tandis que le robot continue tout seul en tant qu'AUV.
Le personnel de MBARI a été impliqué dans plusieurs aspects du projet. Ingénieur principal Kakani Katija, Scientifique principal Bruce Robison, et l'ingénieur mécanicien Brett Hobson ont participé à la conception du véhicule. Le système informatique principal du véhicule est basé sur une conception développée pour l'AUV longue portée de MBARI. Le système de suivi des animaux est conçu par l'ingénieur logiciel Mike Risi, avec Katija et MBARI Adjunct et le professeur de l'Université de Stanford Steve Rock, basé sur un système qui a déjà été testé sur plusieurs ROV MBARI.
Au cours du récent programme sur le terrain, les ingénieurs de l'équipe ont assemblé le Mesobot et l'ont testé dans l'immense réservoir d'essai d'eau salée intérieur de MBARI. Après avoir vérifié que le véhicule fonctionnait correctement, ils l'ont emmené en mer sur le navire de recherche de MBARI Rachel Carson pour trois jours d'essais sur le terrain en eau libre dans la baie de Monterey.

Lancement du Mesobot depuis le pont du navire de recherche de MBARI Rachel Carson. Crédit :WHOI/ Erik Olsen
Lors des essais sur le terrain, le Mesobot a fait cinq plongées, chacun plusieurs centaines de mètres sous la surface. Ces tests ont aidé les concepteurs à tester les systèmes du véhicule dans des conditions réelles et à affiner leurs méthodes de lancement du véhicule du côté d'un navire roulant. La gestion de la fine attache présentait un problème particulier, mais attendu, défi. « La suite d'instruments scientifiques à bord du Rachel Carson et l'expertise de la manutention du navire et du travail sur le pont ont été cruciales pour notre succès, " a déclaré Dana Yoerger, concepteur et ingénieur en chef de Mesobot.
Pour aider à garder un œil sur le véhicule et son attache, l'équipe a utilisé le "SmartClump" de MBARI, " un ensemble lesté de capteurs et de caméras attachés à une longe. Cela donne aux pilotes et aux scientifiques une perspective aérienne qui rend les opérations sous-marines plus sûres et plus efficaces.
Finalement, les chercheurs espèrent utiliser le Mesobot pour effectuer des études d'une journée sur des animaux individuels ou des groupes d'animaux alors qu'ils participent à la « migration verticale diurne », la plus grande migration animale sur Terre. De nombreux animaux marins (y compris délicats, gelées à corps mou) migrent sur des centaines de mètres vers la surface de l'océan au crépuscule puis redescendent dans les profondeurs à l'aube. Ce phénomène est encore mal connu. Les chercheurs espèrent que le Mesobot sera en mesure de suivre des animaux individuels au cours de leur migration pour en savoir plus sur comment et pourquoi ils subissent ce voyage quotidien pénible.