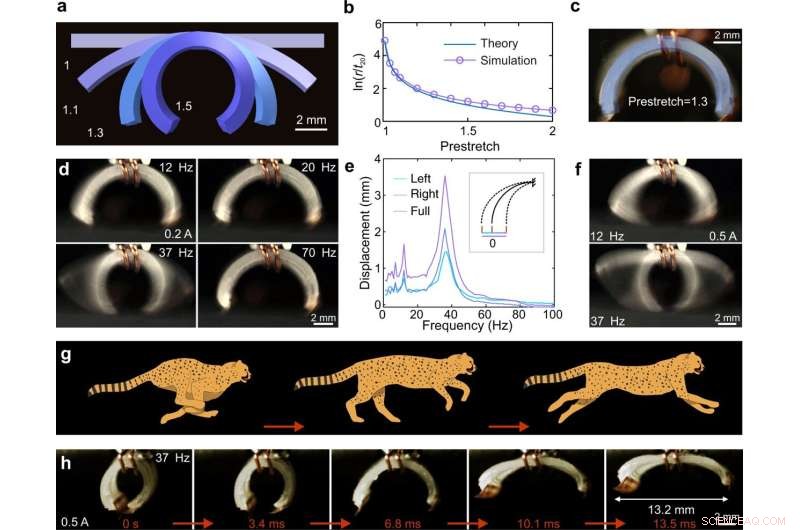
Conception et caractérisation de SEMR à petite échelle. a Forme simulée du film bicouche avec différents pré-étirements :1,0, 1,1, 1,3 et 1,5. b Rayon simulé et calculé du film bicouche en fonction du pré-étirage appliqué. c Images superposées des formes SEMR expérimentales et simulées (vue de côté) avec un pré-étirement de 1,3. d Instantanés des vibrations SEMR pour un courant carré de 0,2 A avec différentes fréquences (film supplémentaire 2). Les trames 37 Hz et 12 Hz correspondent au principal et au deuxième plus grand maxima spectral, que l'on peut voir en e. e Déplacement horizontal du pied gauche du robot soumis à un courant carré de 0,2 A à différentes fréquences (Film supplémentaire 2). Le robot est monté sur le dessus d'un aimant et serré au milieu avec des fils de cuivre. L'encart illustre trois déplacements (gauche, droite et plein). Ils correspondent au déplacement maximum de la position de référence "0" (pas de courant) vers la gauche (extension), la droite (contraction) et leur somme, respectivement. La courbe supérieure (Full) montre la plage complète du déplacement du pied. f Les images du test de vibration pour des courants d'onde carrée de 0,5 A à des fréquences de 12 Hz et 37 Hz (Film supplémentaire 2) illustrent la plage de mouvement à l'écart et à proximité de la fréquence de résonance. g Illustration représentant un guépard courant. h Instantanés de la vidéo de la caméra à grande vitesse (film supplémentaire 2), qui montrent les étapes du mouvement du robot entraîné par un courant d'onde carrée (0,5 A, 37 Hz). Crédit :Nature Communications (2022). DOI :10.1038/s41467-022-32123-4
Une équipe de chercheurs de l'Université Johannes Kepler, en Autriche, a développé une série de minuscules robots électromécaniques orientables qui peuvent marcher, courir, sauter et nager à des vitesses élevées pour leur taille. Dans leur article publié dans la revue Nature Communications, le groupe décrit comment ils ont construit leurs robots et suggère des utilisations possibles pour eux.
Comme le notent les chercheurs, de nombreux animaux peuvent se déplacer rapidement, comme les guépards ou les gazelles. Ces traits ont évolué pour aider les animaux à capturer des proies ou à échapper à la capture par les prédateurs. Créer des robots avec des capacités de vitesse similaires est un objectif des scientifiques depuis de nombreuses années, mais y parvenir s'est avéré difficile. Dans ce nouvel effort, les chercheurs ont construit une série de robots utilisant de minuscules actionneurs électromagnétiques souples avec des bobines de métal liquide intégrées qui sont rapides pour leur taille.
Pour fabriquer leurs robots, les chercheurs ont imprimé des bobines de métal liquide sur différents substrats présentant différentes caractéristiques souhaitables, telles que la pliabilité. Les bobines ont été imprimées de manière à permettre à différentes parties du substrat d'être manipulées de la manière souhaitée - plier une seule partie, par exemple, pourrait permettre à une extrémité arrière de bruire comme une queue lorsqu'elle nage comme un poisson. Plier d'autres parties autorisées pour marcher, sauter et diriger. Les chercheurs ont également ajouté d'autres éléments pour améliorer les performances, comme des pieds en dents de scie ou en forme de L. Tous les robots étaient contrôlés à l'aide d'un champ magnétique et alimentés par une attache ou une batterie.
Les chercheurs ont utilisé des longueurs corporelles par seconde (BL/s), ce qui permet des comparaisons non seulement avec d'autres robots minuscules, mais aussi avec des robots de toutes tailles, et même avec des animaux. Une voiture de course de formule I, par exemple, peut se déplacer à environ 50 BL/s.
En testant leurs robots, les chercheurs ont découvert que leur robot de course attaché de la taille d'un timbre-poste pouvait se déplacer à environ 70 BL/s sur sa meilleure surface et environ 35 BL/s sur des surfaces arbitraires - son robot non attaché, chargé d'une batterie, ne pouvait gérer que 2,1 BL / s. Ils ont également découvert que leur robot nageur captif pouvait nager à environ 4,8 BL/s. Pour mettre les résultats en perspective, un guépard tourne entre 20 et 30 BL/s.
© 2022 Réseau Science X Un petit robot en forme de poisson "nage" pour ramasser des microplastiques