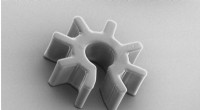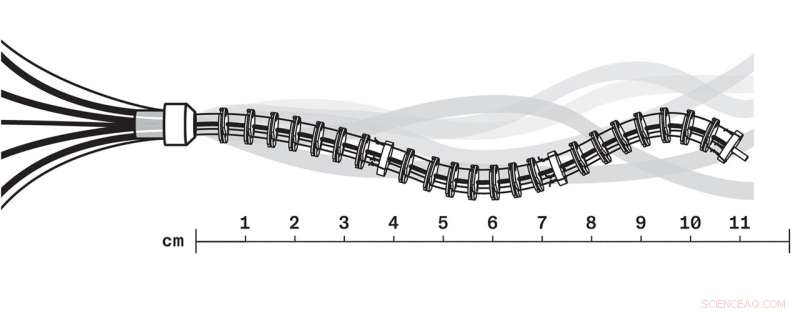
Les robots continuum "à tendon" représentés ici mesurent, dans la réalité, environ sept millimètres de diamètre et sont construits en sections dont la longueur peut varier de 15 à 70 millimètres. D'autres modèles peuvent être encore plus étroits. Tous présentent un mouvement tentaculaire. Crédit :Université de Toronto
Jessica Burgner-Kahrs, directrice du Continuum Robotics Lab de l'Université de Toronto à Mississauga, et son équipe construisent des robots très fins, flexibles et extensibles, de quelques millimètres de diamètre, destinés à la chirurgie et à l'industrie. Vous pourriez l'appeler "zoobotique".
Contrairement aux robots humanoïdes, les robots dits continuum sont dotés de longs corps sans membres, un peu comme ceux d'un serpent, qui leur permettent d'accéder à des endroits difficiles d'accès.
Prenons l'exemple d'un neurochirurgien qui doit retirer une tumeur au cerveau. À l'aide d'un outil chirurgical traditionnel et rigide, le chirurgien doit atteindre la masse cancéreuse en suivant un chemin rectiligne dans le cerveau, et risque de percer et d'endommager les tissus vitaux.
Professeure agrégée de sciences mathématiques et informatiques à l'Université de Mississauga, Burgner-Kahrs envisage un jour où l'un de ses robots ressemblant à des serpents, guidé par un chirurgien, serait capable d'emprunter un chemin sinueux autour du tissu vital tout en atteignant le site chirurgical précis. Des tumeurs cérébrales auparavant inopérables peuvent soudainement devenir opérables.
"Cela pourrait révolutionner la chirurgie", dit-elle.
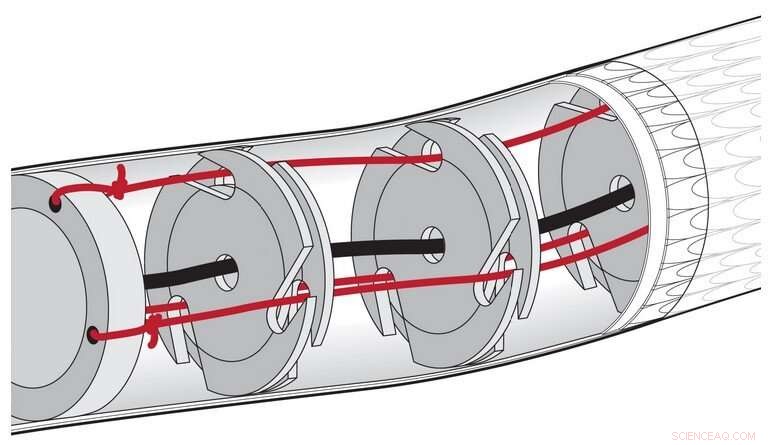
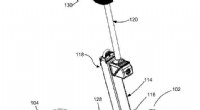
Les fils traversant le "corps" du robot s'attachent à un disque plus épais à l'extrémité de chaque segment du corps. Ces fils sont tirés pour contrôler des segments individuels du robot et les plier dans différentes directions. Des aimants à l'intérieur de chaque disque, disposés avec des polarités alternées, garantissent que les disques restent équidistants, quelle que soit la longueur du segment de robot. Cela aide le robot à se plier comme il le souhaite et à parcourir une trajectoire curviligne dans un mouvement de « suivre le guide » – le « corps » en forme de serpent suit la trajectoire de la « tête ». Le laboratoire a mis au point une gaine d'écailles superposées prises en sandwich entre deux couches de silicone. Lorsqu'un vide est appliqué entre les couches de silicone, le robot normalement flexible devient rigide. Crédit :Colin Hayes
Burgner-Kahrs, informaticienne et ingénieure en mécanique, explique que son laboratoire développe également une génération plus avancée de robots continuum équipés de capteurs et capables de se diriger partiellement. Un chirurgien devrait faire fonctionner le robot à distance avec un ordinateur, mais le robot saurait éviter les obstacles et reconnaître sa destination. Un chirurgien pourrait déployer l'un de ces robots pour prélever un échantillon de tissu de l'abdomen, par exemple, ou injecter un médicament anticancéreux directement dans une tumeur des poumons.
Il y a aussi des utilisations en dehors du corps humain.
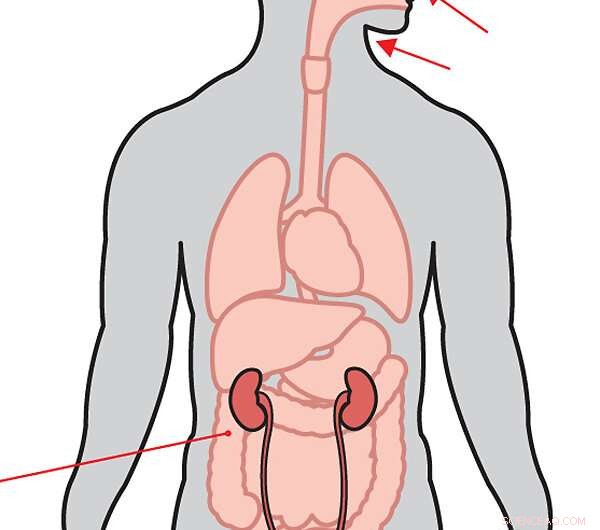
Burgner-Kahrs développe différents types de robots continuum qui pourraient être utilisés dans les chirurgies en trou de serrure, causant encore moins de traumatismes aux patients que les techniques chirurgicales peu invasives actuelles. Crédit :Colin Hayes
Un robot continuum pourrait glisser à l'intérieur d'un moteur à réaction, l'inspectant pour les dommages. Le laboratoire expérimente de nouvelles formes encore plus adroites et extensibles. Un design récent, avec des applications potentielles de recherche et de sauvetage, s'inspire de l'origami :il est très léger et peut s'allonger jusqu'à 10 fois plus que d'autres modèles.
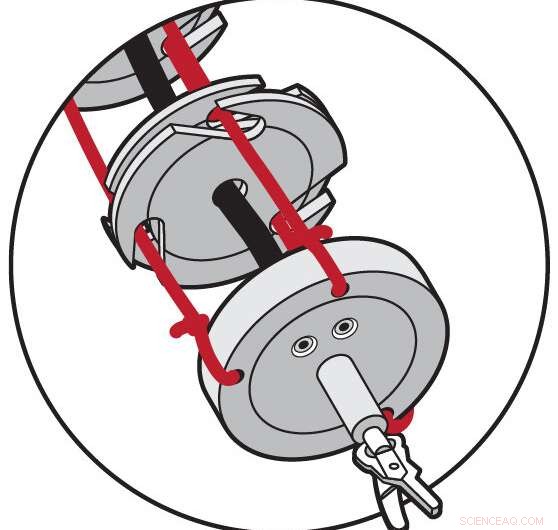
Les robots pourraient être équipés de caméras, permettant à l'opérateur de voir où se trouve le robot. De minuscules outils chirurgicaux pourraient être montés au besoin, y compris des forceps, un laser ou un dispositif d'aspiration. Crédit :Colin Hayes
Robots continuum de nouvelle génération
Pour développer des robots pouvant être utilisés en toute sécurité dans diverses applications médicales et autres, Burgner-Kahrs vise à répondre aux questions suivantes :