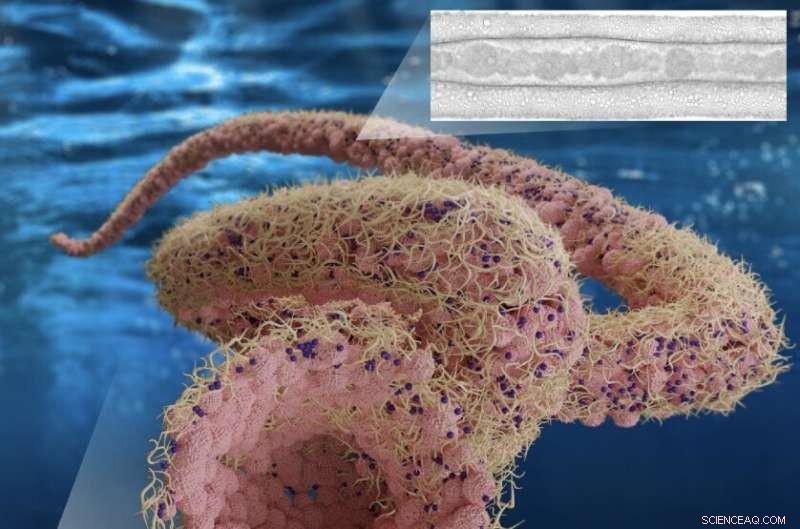
Le rendu amplifié des aquabots. La micrographie dans le coin inférieur gauche est la forme de flexion "σ" de l'aquabot. La micrographie dans le coin supérieur droit représente les structures compartimentées de l'aquabot. Reproduit avec la permission de {Zhu, Shipei, et al. "Aquabots". ACS nano (2022).} Copyright {2022} American Chemical Society.
Ces dernières années, les roboticiens ont développé une grande variété de systèmes robotiques avec différentes structures corporelles et capacités. La plupart de ces robots sont soit constitués de matériaux durs, tels que les métaux, soit de matériaux mous, tels que le silicium et les matériaux caoutchouteux.
Des chercheurs de l'Université de Hong Kong (HKU) et du Lawrence Berkeley National Laboratory ont récemment créé des Aquabots, une nouvelle classe de robots mous principalement constitués de liquides. Comme la plupart des systèmes biologiques sont principalement constitués d'eau ou d'autres solutions aqueuses, les nouveaux robots, présentés dans un article publié dans ACS Nano , pourraient avoir des applications biomédicales et environnementales de grande valeur.
"Nous nous sommes engagés dans le développement d'assemblages interfaciaux adaptatifs de matériaux à l'interface huile-eau et eau-eau à l'aide de nanoparticules et de polyélectrolytes", ont déclaré Ho Cheung (Anderson) Shum, Thomas P. Russell et Shipei Zhu à TechXplore par e-mail. "Notre idée était d'assembler les matériaux que l'interface et les assemblages verrouillent dans les formes des liquides. Les formes sont dictées à l'aide de forces extérieures pour générer des formes arbitraires ou d'utiliser l'impression 3D tout liquide pour pouvoir organiser spatialement les assemblages. "
Shum, Russell, Zhu et leurs collègues ont couplé des techniques d'impression 3D tout liquide avec des assemblages aqueux à deux phases (ATPS), des stratégies d'assemblage de structures 3D, pour réaliser des constructions artificielles qui imitent les systèmes biologiques. L'ATPS est un domaine d'intérêt clé pour le groupe de recherche de HKU dirigé par le professeur Shum.
L'idée de cet article récent est venue lorsque Zhu, alors étudiant diplômé à HKU, a commencé à réfléchir à la possibilité d'intégrer des nanoparticules magnétiques dans les systèmes d'assemblage ATPS. Cela leur permettrait de diriger le mouvement des constructions ATPS à l'aide de champs magnétiques externes, ce qui produirait des systèmes robotiques ultra-doux, flexibles et pouvant être adaptés à des fonctions spécifiques.
"Notre article est l'aboutissement des durs labeurs de Zhu", ont déclaré Shum et Russell. "Les robots mous actuels sont conçus pour des matériaux comme les poly(diméthylsiloxanes) qui sont excellents pour la flexibilité mais ont des limites, telles que la mesure dans laquelle vous pouvez les compresser. Les fonctionnaliser avec des fonctions chimiques spécifiques est important pour la capture et la livraison des matériaux, mais est difficile. Les Aquabots surmontent ces limitations."
Les robots introduits par cette équipe de chercheurs ont été assemblés en milieu aqueux. Cela signifie qu'ils peuvent fonctionner dans des environnements aqueux et peuvent également être adaptés pour accomplir des tâches spécifiques en utilisant des composés hydrosolubles.
"Les Aquabots créent de nouvelles opportunités pour reproduire des matériaux et des caractéristiques bio-inspirés, tels que la perméabilité dynamique et la compartimentation", ont déclaré Russell et Zhu. "Les robots sont entièrement aqueux, avec de l'eau à l'intérieur et de l'eau à l'extérieur. Ils sont facilement fonctionnalisés pour être biocompatibles, il n'est donc pas difficile d'imaginer des bio-applications, c'est-à-dire dans le corps, où de telles constructions pourraient être utiles."
Les structures Aquabot présentées dans le récent article de l'équipe sont très simples, car il s'agit d'un prototype qui montre comment elles pourraient être assemblées. À l'avenir, cependant, le même processus pourrait être utilisé pour créer des structures plus complexes capables de s'attaquer à des tâches plus avancées.
"Notre étude démontre la capacité de construire des robots et de mener des fonctions robotiques basées sur la fabrication aqueuse, et inspire la conception de robots aqueux similaires pour des applications, telles que la micromanipulation biomédicale", ont déclaré Shum, Russell et Zhu. "Imaginez avoir une structure tubulaire simple qui a une fonctionnalité intégrée qui vous permettrait de fabriquer une structure spécifique dans le corps, un robot auto-assemblé qui pourrait faire passer les pièces par des canaux très étroits dans un compartiment plus grand où les pièces souples et flexibles pourraient puis s'auto-assembler pour effectuer une tâche, puis démonté et retiré,"
À l'avenir, les Aquabots pourraient ouvrir des possibilités intéressantes pour de nombreuses applications biomédicales et environnementales du monde réel. Par exemple, ils pourraient être utilisés pour délivrer des médicaments à des endroits spécifiques à l'intérieur du corps humain, pour modifier biologiquement les tissus humains et pour remplir artificiellement les fonctions de systèmes biologiques spécifiques.
"Nous essayons maintenant d'incorporer un hydrogel dans l'assemblage des robots, afin de pouvoir obtenir des changements de forme entièrement réversibles", a ajouté Shum. "Dans nos prochains travaux, il serait également intéressant d'examiner d'autres propriétés et fonctions activées par la plate-forme Aquabot, en plus de la manipulation mécanique et des réactions chimiques de preuve de concept démontrées dans l'article. Il serait intéressant de combiner cela avec d'autres microfluidiques et approches robotiques pour de nouvelles applications."
© 2022 Réseau Science X Un robot pixel magnétique doux qui peut être programmé pour prendre différentes formes














