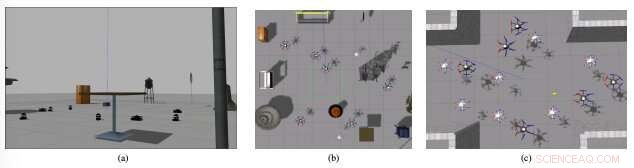
Instantanés pendant que les robots naviguent dans différents environnements inconnus en utilisant l'algorithme proposé dans ce travail. Crédit :Govind Aadithya R et al.
Des chercheurs du SRM Institute of Science and Technology en Inde ont récemment développé un algorithme de génération de trajectoire décentralisée pour les systèmes multi-agents. Leur algorithme, présenté dans un article pré-publié sur arXiv, peut générer des trajectoires sans collision pour les robots lorsqu'ils disposent d'un état initial et de la pose finale souhaitée.
"Govind et son équipe m'ont approché de manière ambitieuse pour me demander ma proposition pour leur projet de licence, " Sivanathan K, chercheur principal qui a supervisé l'étude, a déclaré TechXplore. « Connaissant leur capacité mathématique, J'ai senti qu'ils devraient être assignés à un problème difficile que l'avenir attend de résoudre. Alors que le monde évolue vers les voitures autonomes, J'ai suggéré de développer un algorithme décentralisé pour les véhicules autonomes pour naviguer dans les intersections. Nous avons estimé que les performances de l'algorithme n'étaient pas aux normes, nous avons donc étendu le travail au développement d'un algorithme qui pourrait permettre aux véhicules autonomes de naviguer dans un environnement inconnu, éviter les collisions avec d'autres robots/obstacles."
Les systèmes multi-robots impliquent un certain nombre d'agents robotiques ou de véhicules autonomes collaborant à diverses tâches. Ces systèmes pourraient avoir des applications intéressantes dans de nombreux domaines, y compris le transport, divertissement, la sécurité et l'exploration spatiale.
Lorsque plusieurs robots travaillent ensemble sur une tâche donnée, leurs trajectoires nécessitent une planification minutieuse pour s'assurer que les robots ne se heurtent pas les uns aux autres et que leurs limites dynamiques ne sont pas violées. Jusque là, la plupart des approches de génération de trajectoires ont été centralisées, ce qui signifie qu'ils génèrent au préalable des trajectoires puis les transmettent à des robots individuels.
Alors que les approches centralisées fonctionnent bien dans des environnements connus et avec un nombre limité de robots, ils sont très difficiles à appliquer à plus grande échelle. Dans les années récentes, donc, les chercheurs ont travaillé sur des approches décentralisées qui peuvent replanifier en permanence des trajectoires, réagir à des changements ou des obstacles inattendus dans l'environnement.
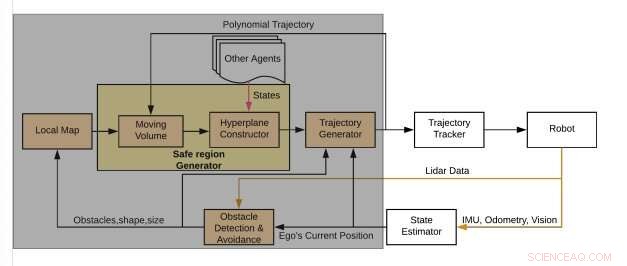
La vue d'ensemble du système d'un agent individuel. Les flèches oranges représentent les données brutes, le rouge représente les données provenant de sources externes et le noir représente les données traitées et le côté flux. L'accent de ce travail est la partie ombrée. Crédit :Govind Aadithya R et al.
L'équipe de chercheurs du SRM Institute a développé un nouvel algorithme décentralisé pour la génération de trajectoires de systèmes multi-agents. Leur approche suit un processus en deux étapes, générer des régions convexes sans collision dans lesquelles un robot sera contraint, en prédisant les positions des autres robots.
« Notre approche a deux sous-objectifs. Le premier est l'Identification de l'environnement, qui comprend la génération de cartes pour le soi et la prédiction de trajectoire pour les autres dans l'environnement afin d'identifier la région sûre de l'ego (du point de vue du véhicule d'intérêt), " Govind Aadithya R, l'un des chercheurs qui a mené l'étude, Dit TechXplore. "Après cela vient l'objectif de la navigation dans la région sûre afin d'atteindre la destination souhaitée, pour laquelle nous générons la trajectoire de l'ego avec les informations disponibles et la replanifions régulièrement pour tenir compte des changements qui se produisent autour de l'ego. Pour s'assurer que l'ego se déplace le long du chemin spécifié, les états sont suivis à l'aide d'un traqueur de trajectoire."
Govind et ses collègues ont utilisé une méthode simple pour la détection d'obstacles, utiliser des cartes basées sur des formes locales pour formuler des régions sûres pour des agents individuels. Sur la base de ces données, leur algorithme prédit les trajectoires d'autres robots et les intègre dans le modèle pour éviter les collisions en redimensionnant les régions dans lesquelles un robot peut naviguer sans entrer en collision.
"Pour moi, l'un des enseignements les plus significatifs de ce travail est que la vérification continue des collisions est d'une importance primordiale pour une navigation sûre et sans collision, " Shravan Krishnan, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. "Aussi, pour éviter les collisions, nous avons constaté que les techniques de cartographie complexes ne sont pas d'une importance primordiale mais sont toujours une nécessité lorsqu'il s'agit d'une utilisation optimale de l'espace. Cela implique que pour les manœuvres conservatrices, les représentations d'obstacles basées sur une géométrie simple suffisent mais pour des manœuvres dynamiques et agressives qui utilisent tout l'espace, les géométries complexes sont une nécessité."
Les chercheurs ont évalué leur approche dans des simulations sur la plateforme Gazebo, l'utilisation de ROS avec des robots aériens plats et des robots à roues non holonomiques ; dans des environnements de type intersection et non structurés. Leur algorithme a été capable de générer efficacement des trajectoires lisses dans des environnements contraints, éviter les collisions entre les robots.
"En allant de l'avant, nous aimerions étendre l'algorithme en 3-D, ajouter une dimension supplémentaire, " Vijay Arvindh B, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Nous travaillons actuellement sur les failles qui doivent être corrigées afin d'évaluer l'algorithme en 3-D."
© 2019 Réseau Science X














