
Illustration conceptuelle du vêtement robotique proposé. Crédit :Jonathan Realmuto/UCR
Les ingénieurs d'UC Riverside développent des "vêtements" robotiques à faible coût pour aider les enfants atteints de paralysie cérébrale à contrôler les mouvements de leurs bras.
La paralysie cérébrale est la cause la plus fréquente d'incapacité physique grave chez l'enfant, et les dispositifs envisagés pour ce projet sont destinés à offrir une assistance quotidienne à long terme aux personnes qui en sont atteintes.
Cependant, les robots traditionnels sont rigides et peu confortables sur le corps humain. Grâce à une subvention de 1,5 million de dollars de la National Science Foundation, ce projet adopte une nouvelle approche consistant à construire des dispositifs à partir de textiles souples, ce qui facilitera également un fonctionnement plus naturel des membres.
"Les matériaux durs n'interagissent pas bien avec les humains", a déclaré Jonathan Realmuto, professeur adjoint de génie mécanique à l'UCR et chef de projet. "Ce que nous recherchons en utilisant des matériaux comme le nylon et l'élastique, ce sont essentiellement des vêtements robotiques."
Ces vêtements contiendront des zones scellées et hermétiques qui peuvent se gonfler, les rendant temporairement rigides et fournissant la force nécessaire au mouvement.
"Disons que vous voulez fléchir le coude pour une boucle de biceps. Nous pouvons injecter de l'air dans des vessies spécialement conçues intégrées dans le tissu qui propulseraient le bras vers l'avant", a déclaré Realmuto.
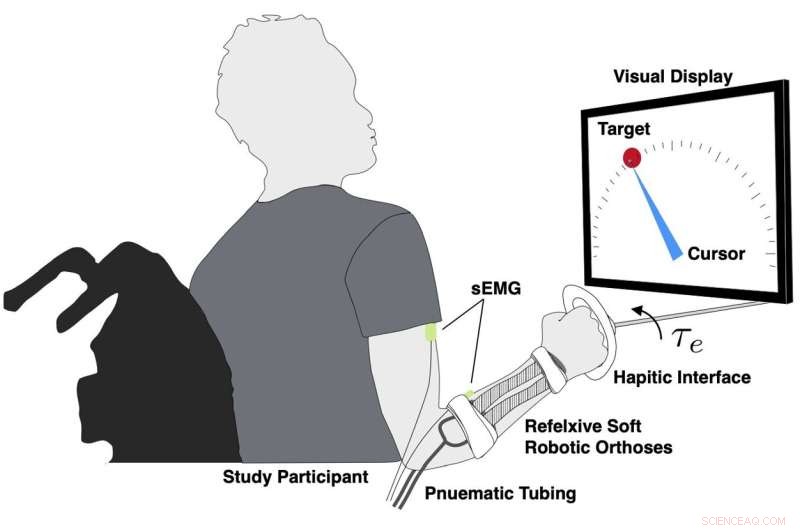
Configuration expérimentale pour les itérations précédentes de l'appareil. Crédit :Jonathan Realmuto/UCR
Le projet se concentrera non seulement sur la construction du robot, mais également sur le développement des algorithmes qui apprennent à la machine à prédire les mouvements que le porteur souhaite exécuter.
"L'un des défis critiques de l'assistance aux mouvements est d'interpréter l'intention d'une personne. Nous voulons un" contrôleur volontaire ", de sorte que le robot se comporte en fonction de ce que l'humain veut faire", a déclaré Realmuto. L'équipe du projet comprend également le professeur adjoint de génie mécanique de l'UCR, Jun Sheng.
Un aspect d'un tel contrôleur utilise une variété de petits capteurs sur les manches pour détecter de petites tensions générées par les muscles lorsqu'ils se contractent. Ces capteurs alimenteront les données de tension dans un algorithme qui sera formé pour en extraire l'intention du porteur.
L'utilisation de textiles largement disponibles, plutôt que de matériaux rigides traditionnels, maintiendra probablement le coût des manchons à un faible niveau. De plus, l'équipe a l'intention de minimiser l'utilisation d'appareils électroniques sophistiqués, ce qui contribuera également à réduire les coûts globaux pour les patients.
Ce projet est mené en partenariat avec l'hôpital pour enfants du comté d'Orange, où les patients d'une clinique pédiatrique des troubles du mouvement aideront à tester et à affiner les prototypes.
De plus, l'équipe de recherche tiendra des réunions annuelles à l'hôpital pour chacune des quatre années du projet. Ces réunions incluront les patients et leurs familles, ainsi que des ergothérapeutes, et solliciteront leurs commentaires sur la technologie au fur et à mesure de son développement.

En partant de la gauche, l'actionneur est dans un état non pressurisé et se déplace vers le gonflage à des pressions croissantes. Crédit :Jonathan Realmuto/UCR
"En centrant les parties prenantes dans notre processus de conception, nous espérons développer un produit qui fonctionne vraiment pour elles", a déclaré Realmuto.
L'équipe de développement considère ce travail comme une amélioration de l'indépendance non seulement pour les patients pédiatriques eux-mêmes, mais aussi pour des communautés entières.
"Si nous pouvons aider les enfants à se brosser les dents, à verser de l'eau ou à ouvrir des portes, des actions que d'autres tiennent pour acquises, c'est une énorme victoire pour eux", a déclaré Realmuto. "Mais c'est aussi une victoire pour leurs familles et leurs soignants."
Bien que ce projet soit axé sur les enfants ayant des troubles du mouvement, la technologie peut éventuellement être utilisée pour d'autres applications et populations, y compris les patients gériatriques et d'autres adultes ayant des problèmes de mouvement.
"Notre technologie est universelle", a déclaré Realmuto. Professeur de génie mécanique pour concevoir un robot "doux" qui pourrait être utilisé dans l'espace














