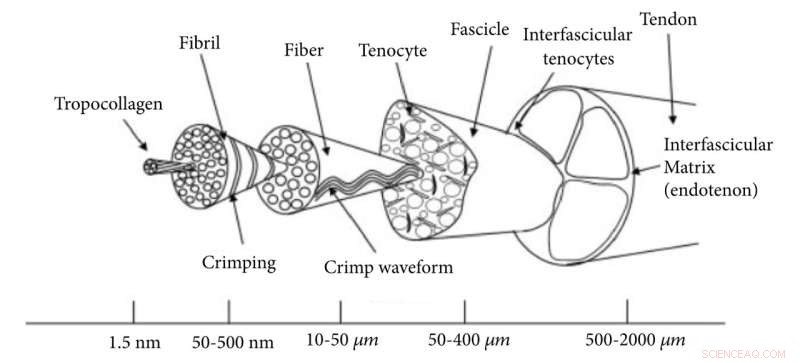
Structure hiérarchique du tissu tendineux (adapté de Thorpe et al). Crédit :Cyborg et systèmes bioniques (2022). DOI :10.34133/2022/9842169
Un article de synthèse rédigé par des scientifiques de l'Université d'Oxford a discuté des avantages possibles de l'utilisation de robots musculo-squelettiques humanoïdes et de systèmes robotiques mous comme plates-formes de bioréacteurs dans la production de constructions tendineuses cliniquement utiles.
Le nouvel article de synthèse, publié le 15 septembre 2022 dans la revue Cyborg and Bionic Systems , résume les tendances actuelles de l'ingénierie tissulaire tendineuse et explique comment les bioréacteurs conventionnels sont incapables de fournir une stimulation mécanique physiologiquement pertinente étant donné qu'ils reposent en grande partie sur des étapes de traction uniaxiales. L'article met ensuite en évidence les robots humanoïdes musculo-squelettiques et les systèmes robotiques mous en tant que plates-formes pour fournir une stimulation mécanique physiologiquement pertinente qui pourrait surmonter cet écart de translation.
Les lésions des tendons et des tissus mous sont un problème social et économique croissant, le marché de la réparation des tendons aux États-Unis étant estimé à 1,5 milliard de dollars US. Les chirurgies de réparation des tendons ont des taux de révision élevés, avec plus de 40 % des réparations de la coiffe des rotateurs qui échouent après l'opération. La production de greffes de tendon conçues à des fins cliniques est une solution potentielle à ce défi. Les bioréacteurs tendineux conventionnels fournissent principalement une stimulation de traction uniaxiale. L'absence de systèmes qui récapitulent la charge tendineuse in vivo est une lacune translationnelle majeure.
"Le corps humain fournit aux tendons une contrainte mécanique tridimensionnelle sous forme de tension, de compression, de torsion et de cisaillement. Les recherches actuelles suggèrent que le tissu tendineux natif sain nécessite plusieurs types et directions de contrainte. Les systèmes robotiques avancés tels que les humanoïdes musculo-squelettiques et les la robotique promet des plateformes capables d'imiter la charge tendineuse in vivo", a expliqué l'auteur Iain Sander, chercheur à l'Université d'Oxford au sein du groupe de recherche sur l'ingénierie des tissus mous.
Les robots humanoïdes musculo-squelettiques ont été initialement conçus pour des applications telles que les mannequins de test de collision, les prothèses et l'amélioration sportive. Ils tentent d'imiter l'anatomie humaine en ayant des proportions corporelles, une structure squelettique, une disposition musculaire et une structure articulaire similaires. Les humanoïdes musculo-squelettiques tels que Roboy et Kenshiro utilisent des systèmes entraînés par les tendons avec des actionneurs myorobotiques qui imitent le tissu neuromusculaire humain.
Les unités myorobotiques se composent d'un moteur à courant continu sans balais qui génère une tension comme les muscles humains, de câbles de fixation qui agissent comme une unité de tendon et d'une carte de commande de moteur avec un encodeur à ressort, qui agit comme le système neurologique en détectant des variables telles que la tension, la compression, la longueur du muscle , et la température.
Les avantages proposés des humanoïdes musculo-squelettiques comprennent la capacité de fournir une charge multiaxiale, un potentiel de charge en tenant compte des schémas de mouvement humain et la fourniture d'amplitudes de charge comparables aux forces in vivo. Une étude récente a démontré la faisabilité de la croissance de tissus humains sur un robot humanoïde musculo-squelettique pour l'ingénierie des tendons.
La robotique douce biohybride se concentre sur le développement de systèmes robotiques biomimétiques et conformes qui permettent des interactions adaptatives et flexibles avec des environnements imprévisibles. Ces systèmes robotiques sont actionnés par un certain nombre de modalités, notamment la température, la pression pneumatique et hydraulique et la lumière.
Ils sont faits de matériaux souples, notamment des hydrogels, du caoutchouc et même du tissu musculo-squelettique humain. Ces systèmes sont déjà utilisés pour fournir une stimulation mécanique aux constructions de tissus musculaires lisses et ont été mis en œuvre in vivo dans un modèle porcin.
Ces systèmes sont attrayants pour l'ingénierie des tissus tendineux étant donné que :i) leurs propriétés flexibles et conformes leur permettent de s'enrouler autour des structures anatomiques, imitant la configuration du tendon natif ii) ils sont capables de fournir un actionnement multiaxial et iii) un certain nombre de techniques utilisées dans la robotique douce chevauche les pratiques actuelles d'ingénierie des tissus tendineux.
Pour l'avenir, l'équipe envisage des systèmes robotiques avancés comme des plates-formes qui fourniront un stimulus mécanique physiologiquement pertinent aux greffes de tendon avant leur utilisation clinique. Il y a un certain nombre de défis à considérer lors de la mise en œuvre de systèmes robotiques avancés. Premièrement, il sera important pour les expériences futures de comparer les technologies proposées dans cette revue aux bioréacteurs conventionnels.
Avec le développement de systèmes capables de fournir un chargement multiaxial, il sera important de trouver des méthodes pour quantifier la déformation en 3D. Enfin, les systèmes robotiques avancés devront être plus abordables et accessibles pour une mise en œuvre généralisée.
"Un nombre croissant de groupes de recherche montrent qu'il est possible d'utiliser la robotique avancée en combinaison avec des cellules et des tissus vivants pour des applications d'ingénierie tissulaire et de bioactionnement. Nous sommes maintenant à une étape passionnante où nous pouvons explorer les différentes possibilités d'incorporer ces technologies dans l'ingénierie tissulaire tendineuse et d'examiner si elles peuvent vraiment aider à améliorer la qualité des greffes de tendon artificielles », a déclaré Pierre-Alexis Mouthuy, auteur principal de l'article de synthèse.
À long terme, ces technologies ont le potentiel d'améliorer la qualité de vie des individus, en diminuant la douleur et le risque d'échec de la réparation des tendons, pour les systèmes de santé, en réduisant le nombre de chirurgies de révision, et pour l'économie, en améliorant la productivité au travail et en réduisant Coûts des soins de santé. Utilisation d'une épaule robotisée pour faire pousser du tissu tendineux