Les plus petits microrobots électroniques automoteurs développés par les chercheurs manœuvrent dans un liquide au-dessus d'une pièce de 1 centime d'euro. Crédit :TU Chemnitz.
Une équipe de recherche internationale dirigée par le Dr Oliver Schmidt, travaillant à l'Université de technologie de Chemnitz (TU Chemnitz) et Leibniz IFW Dresden a récemment développé un système microrobotique avec un large éventail d'applications possibles, allant de la réalisation de micro-chirurgies à la livraison de marchandises aux humains. Ce robot, présenté dans un article publié dans Nature Électronique , s'appuie sur une idée introduite par la même équipe de chercheurs il y a près d'une décennie.
« Nous avons commencé à explorer l'idée de créer un petit système microrobotique autopropulsé par un puissant moteur à réaction et doté de composants microélectroniques à bord il y a près de dix ans. " Schmidt a déclaré à TechXplore. " Notre idée initiale était de construire un microsystème automoteur intelligent qui peut interagir avec des cellules biologiques uniques, qui sont de taille similaire au microsystème lui-même. Ce système doit pouvoir se déplacer, sentir son environnement, transporter des marchandises, livrer des médicaments et effectuer des micro-chirurgies. »
Depuis que Schmidt et ses collègues ont présenté pour la première fois leur concept de système microrobotique, leur équipe et plusieurs autres dans le monde ont essayé de créer des technologies similaires, principalement in vitro (c'est-à-dire en utilisant des boîtes de Pétri). Mettre en œuvre un tel système à l'intérieur du corps humain, cependant, s'est avéré beaucoup plus difficile. En réalité, afin d'accomplir des tâches à l'intérieur du corps, le système devrait être contrôlé de l'extérieur et les informations qu'il recueille (par exemple, les données de diagnostic) devraient être facilement transmises au monde extérieur (par exemple, aux médecins ou aux professionnels de la santé).
"Pour qu'un système microrobotique fonctionne dans le corps humain, il doit contenir de l'énergie électrique, capteurs, actionneurs, antennes et circuits microélectroniques, " Schmidt a expliqué. " L'objectif principal de nos travaux récents était de faire un grand pas vers cet objectif final (et certes très ambitieux); toujours de manière simplifiée, bien sûr."
Schmidt et ses collègues ont fabriqué leur microsystème flexible en intégrant des composants micro et nano électroniques sur une surface de puce, d'une manière similaire à la façon dont la technologie du silicium est utilisée pour construire des puces informatiques. Une différence clé entre leur système et les puces informatiques ordinaires, cependant, est que la conception du premier comprend des moteurs à réaction créés à l'aide d'une approche mise au point il y a environ vingt ans, qui n'est généralement pas utilisé dans le développement de la microélectronique grand public.
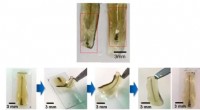
"L'astuce consiste à mettre sur la puce des matériaux minces très sollicités, qui s'enclenchent (enroulent) dans des structures de microtubes à rouleaux suisses, lorsqu'ils sont décollés de la surface de la puce, " a déclaré Schmidt. " Cette procédure peut être bien contrôlée, de sorte que les microtubes enroulés sont solidement connectés sur deux côtés opposés au système microrobotique. Si ces microtubes sont recouverts de platine à l'intérieur, des bulles d'oxygène sont générées par une réaction catalytique, une fois que le platine entre en contact avec une solution aqueuse contenant un peu de peroxyde d'hydrogène (H

Le Dr Oliver G. Schmidt lors de ses recherches. Crédit :Jacob Muller.
En raison de la stratégie de conception non conventionnelle utilisée par Schmidt et ses collègues, lorsque le système microrobotique est placé dans une solution aqueuse contenant du peroxyde d'hydrogène (H
"Ce principe de propulsion par jet a été mis au point par notre groupe il y a 12 ans, " a déclaré Schmidt. Cependant, un moteur biréacteur comme dans notre travail actuel n'a jamais été construit auparavant."
La réaction catalytique au cœur de la stratégie de propulsion à réaction des chercheurs peut être contrôlée en modifiant la température des moteurs à réaction. Une température élevée entraîne plus de bulles et une poussée plus forte; une température basse dans moins de bulles et une poussée plus faible.
Schmidt et ses collègues contrôlent la température de l'un des deux moteurs à réaction en appliquant un courant qui traverse un élément résistif, qui est relié au moteur. Les changements de température augmentent la quantité de bulles générées et la poussée subséquente dans l'un des moteurs à réaction, qui à son tour permet au système de faire des virages à droite ou à gauche.
"Vous pouvez vous demander comment nous avons fourni le courant qui chauffe l'élément résistif, " dit Schmidt. " A cet effet, nous avons intégré une petite antenne dans le microsystème qui peut être alimentée par de l'énergie sans fil de l'extérieur (similaire à la charge inductive sans fil de votre téléphone portable). Ainsi, l'énergie électrique est à bord et peut être utilisée, ce qui est entièrement nouveau pour un si petit microbot automoteur."
Le petit robot développé par Schmidt et ses collègues a aussi un petit bras, ce qui lui permet de saisir et de libérer de petits objets dans son environnement. Lorsque la température du système change, le petit bras exécute différentes actions, se pencher pour saisir des objets (p. micro-pilules) ou se pencher pour les libérer.
"Ce bras robotique intégré est également une toute nouvelle fonctionnalité pour les microsystèmes automoteurs, " dit Schmidt. " Enfin, le microrobot peut avoir une minuscule LED infrarouge à bord, qui peut être allumé par l'énergie transmise sans fil. Cette LED pourrait être utile pour suivre le microrobot à l'intérieur du corps. Allumer et éteindre de minuscules LED sur un microrobot mobile n'a jamais été montré auparavant."
Le petit système robotique développé par Schmidt et son équipe est fait d'un matériau très flexible. Cela signifie qu'il peut être plié ou déformé sans se casser, ainsi, il pourrait même traverser de minuscules capillaires ou d'autres petits canaux du corps humain et continuer à fonctionner normalement.
À l'avenir, ce nouveau système pourrait avoir un certain nombre d'applications intéressantes. Par exemple, il pourrait accomplir des tâches à l'intérieur du corps humain qui nécessitent un haut niveau de précision, y compris les interventions chirurgicales ou diagnostiques.
« Nous avons démontré que l'énergie électrique peut être transférée sans fil vers des systèmes microrobotiques ultra-petits et que cette énergie peut être utilisée pour effectuer des tâches utiles :piloter le microrobot à distance ou allumer et éteindre une LED infrarouge, " Schmidt a déclaré. "La prochaine étape sera de faire fonctionner le système dans des fluides biologiques tels que le sang. Dans ce but, les moteurs doivent être construits d'une manière légèrement différente."
© 2020 Réseau Science X