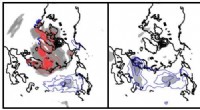
Figure illustrant la stratégie de détection tactile basée sur la vision introduite par les chercheurs. Crédit :Sferrazza, et al., ieeexplore.ieee.org/document/8918082
Pour interagir efficacement avec leur environnement, les robots devraient être capables d'identifier les caractéristiques de différents objets simplement en les touchant, comme le font les humains. Cela leur permettrait de se procurer et de gérer plus efficacement les objets, utiliser les informations recueillies par les capteurs pour ajuster leurs stratégies de saisie et de manipulation.
Avec ça en tête, des groupes de recherche du monde entier ont essayé de développer des techniques qui pourraient donner aux robots un sens du toucher en analysant les données collectées par les capteurs, dont beaucoup sont basés sur l'utilisation d'architectures d'apprentissage en profondeur. Bien que certaines de ces méthodes soient prometteuses, ils nécessitent généralement de grandes quantités de données d'apprentissage et ne se généralisent pas toujours bien sur des objets jamais vus auparavant.
Des chercheurs de l'ETH Zurich ont récemment introduit une nouvelle stratégie basée sur l'apprentissage en profondeur qui pourrait permettre la détection tactile dans les robots sans nécessiter de grandes quantités de données du monde réel. Leur approche, décrit dans un article prépublié sur arXiv, implique la formation de réseaux de neurones profonds entièrement sur des données de simulation.
"Notre technique apprend à partir des données comment prédire la répartition des forces exercées par un objet en contact avec la surface de détection, " Carlo Sferrazza, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Jusque là, ces données (de l'ordre de dizaines de milliers de points de données) devaient être collectées dans un dispositif expérimental sur plusieurs heures, ce qui était coûteux en termes de temps et d'équipement. Dans ce travail, nous avons généré nos données entièrement en simulation, en conservant une haute précision de détection lors du déploiement de notre technique dans le monde réel."
Dans leurs expériences, Sferrazza et ses collègues ont utilisé un capteur qu'ils ont construit avec des composants simples et peu coûteux. Ce capteur est composé d'une caméra standard placée sous un matériau souple, qui contient une dispersion aléatoire de minuscules particules de plastique.
Lorsqu'une force est appliquée à sa surface, le matériau mou se déforme et fait bouger les particules de plastique. Ce mouvement est ensuite capturé par la caméra du capteur et enregistré.
"Nous exploitons les motifs d'image créés par les particules en mouvement pour extraire des informations sur les forces provoquant la déformation du matériau, " a expliqué Sferrazza. " En incorporant de manière dense les particules dans le matériau, nous pouvons obtenir une résolution extrêmement élevée. Étant donné que nous adoptons une approche axée sur les données pour résoudre cette tâche, nous pouvons surmonter la complexité de la modélisation du contact avec des matériaux mous et estimer la distribution de ces forces avec une grande précision."
Essentiellement, les chercheurs ont créé des modèles du matériau souple du capteur et de la projection de la caméra à l'aide de méthodes informatiques de pointe. Ils ont ensuite utilisé ces modèles dans des simulations, pour créer un jeu de données de 13, 448 images synthétiques idéales pour la formation d'algorithmes de détection tactile. Le fait qu'ils aient pu générer des données d'entraînement pour leur modèle de détection tactile dans des simulations est très avantageux, car cela les empêchait d'avoir à collecter et annoter des données dans le monde réel.
"Nous avons également développé une technique d'apprentissage par transfert qui nous permet d'utiliser le même modèle sur plusieurs instances des capteurs tactiles que nous produisons dans le monde réel, sans avoir besoin de données supplémentaires, " a déclaré Sferrazza. "Cela signifie que chaque capteur devient moins cher à produire, car ils ne nécessitent pas d'efforts d'étalonnage supplémentaires."
Les chercheurs ont utilisé l'ensemble de données synthétiques qu'ils ont créé pour former une architecture de réseau neuronal pour les applications de détection tactile basées sur la vision, puis ont évalué ses performances dans une série de tests. Le réseau de neurones a obtenu des résultats remarquables, faire des prédictions de détection précises sur des données réelles, même s'il a été formé sur des simulations.
"L'architecture de réseau de neurones sur mesure que nous avons formée montre également des possibilités de généralisation très prometteuses pour une utilisation dans d'autres situations, appliqué à des données assez différentes de celles utilisées dans nos simulations, par exemple., pour l'estimation du contact avec un ou plusieurs objets de formes arbitraires, " a déclaré Sferrazza.
À l'avenir, l'architecture d'apprentissage en profondeur développée par Sferrazza et ses collègues pourrait fournir aux robots un sens artificiel du toucher, améliorer potentiellement leurs compétences de préhension et de manipulation. En outre, l'ensemble de données synthétiques qu'ils ont compilé pourrait être utilisé pour former d'autres modèles de détection tactile ou pourrait inspirer la création de nouveaux ensembles de données basés sur la simulation.
"Nous voulons maintenant évaluer nos algorithmes dans des tâches qui impliquent des interactions très générales avec des objets complexes, et nous travaillons également à améliorer leur précision, " a déclaré Sferrazza. " Nous pensons que cette technique montrera ses avantages lorsqu'elle sera appliquée à des tâches robotiques du monde réel, telles que les applications qui impliquent la manipulation fine d'objets fragiles, comme un verre ou un œuf."
© 2020 Réseau Science X