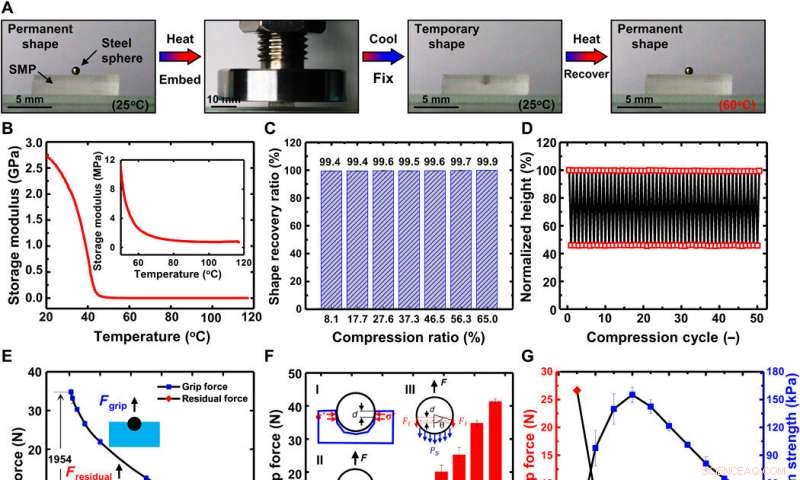
Caractérisation du matériau époxy SMP et du préhenseur SMP. (A) Démonstration de la fixation temporaire de la forme et de l'effet permanent de mémoire de forme du SMP. (B) Module de stockage en fonction de la température du matériau SMP. Encarts :Grossissement du module de stockage en fonction de la température à des températures plus élevées. (C) Taux de récupération de forme du SMP sous différents taux de compression. (D) Performance du SMP sous compression répétée. (E) Comparaison de l'adhérence et des forces résiduelles en fonction des vitesses d'adhérence. Paramètres pour la mesure de la force de préhension :température d'encastrement, 120°C; température de tirage, 30°C; profondeur d'encastrement, 3 millimètres; diamètre du pénétrateur, 5 millimètres. (F) Influence de l'angle d'encastrement sur la force de préhension (température d'encastrement, 120°C; température de tirage, 30°C; diamètre du pénétrateur, 5 millimètres; vitesse de préhension, 100 µm/s). Les médaillons montrent le mécanisme sous-jacent de la préhension. (I et II) Illustrations de profil montrant l'évolution de la configuration du préhenseur SMP et du système de sphère embarqué pendant le processus de préhension. (III) Diagramme de force de la sphère encastrée dans la direction verticale. (G) Influence de la température sur la force de préhension. La ligne avec des losanges rouges donne la force de préhension, tandis que la ligne marquée par des carrés bleus montre l'adhérence. La force de préhension est obtenue à partir des essais d'encastrement et d'arrachement (température d'encastrement, 120°C; température de tirage, 30°C; diamètre du pénétrateur, 5 millimètres; profondeur d'encastrement, 3 millimètres; vitesse de préhension, 1000 µm/s), tandis que la force d'adhérence sous la même vitesse de séparation (1000 µm/s) est obtenue par des tests de traction entre une plaque de verre et le SMP. Crédit photo :Changhong Linghu, Université du Zhejiang. Crédit: Avancées scientifiques (2020). DOI :10.1126/sciadv.aay5120
Une équipe de chercheurs de l'Université du Zhejiang a créé un nouveau robot préhenseur utilisant un polymère à mémoire de forme. Dans leur article publié dans la revue Avancées scientifiques , le groupe décrit le matériel, son utilisation comme préhenseur, et à quel point cela a fonctionné.
Au cours des dernières décennies, les scientifiques ont utilisé diverses approches pour donner à un robot la capacité de ramasser et de manipuler des objets et de les déposer, le tout sans endommager l'objet. De nombreux progrès ont été réalisés dans les préhenseurs robotisés, en raison principalement des progrès de la technologie des puces électroniques, mais il y a encore beaucoup de place pour l'amélioration. L'un des plus grands défis consiste à développer une pince capable de saisir et de manipuler des objets de presque toutes les formes, des tailles différentes, et fabriqués à partir de différents matériaux. Créer une pince semblable à une main humaine capable de ramasser une épingle sur une table, transporter un œuf cru à travers une pièce ou attacher un ruban d'enfant dans ses cheveux, nécessite un préhenseur très sophistiqué et un logiciel associé. Dans ce nouvel effort, les chercheurs ont supprimé le besoin de sophistication en adoptant une approche totalement différente.
Des recherches antérieures ont montré que lorsque certains polymères sont chauffés, ils se dilatent légèrement et deviennent mous. Les chercheurs ont utilisé les deux propriétés pour créer leur nouvelle pince. Ils ont créé une pince en polymère qui se ramollit lorsqu'elle est chauffée à 45 °C, puis durcit à nouveau lorsqu'elle est exposée à 25 °C. Sa forme de base est cuboïde (un rectangle 3-D). Ils ont ensuite fixé la pince à un simple bras capable de la placer contre une table ou de la soulever juste au-dessus de la table, suffisamment pour permettre le placement de divers objets en dessous.
Le test consistait à placer un objet tel qu'une petite bille d'acier sous la pince, puis à chauffer l'ensemble de l'appareil dans une enceinte à 45 °C. Après quelques minutes, le polymère s'était ramolli. Les chercheurs ont ensuite abaissé la pince sur l'objet, permettant à l'objet d'être englobé, comme si vous posiez un bâton de beurre ramolli sur une fourchette. La température dans l'enceinte a ensuite été réduite à 25°C. À ce moment, le polymère a légèrement rétréci, saisir l'objet pendant qu'il se raffermissait. Les chercheurs ont ensuite soulevé la pince et l'objet qu'elle tenait. Pour remettre l'objet en place, les chercheurs ont abaissé la pince jusqu'à la table et élevé la température dans l'enceinte à 45°C.
© 2020 Réseau Science X