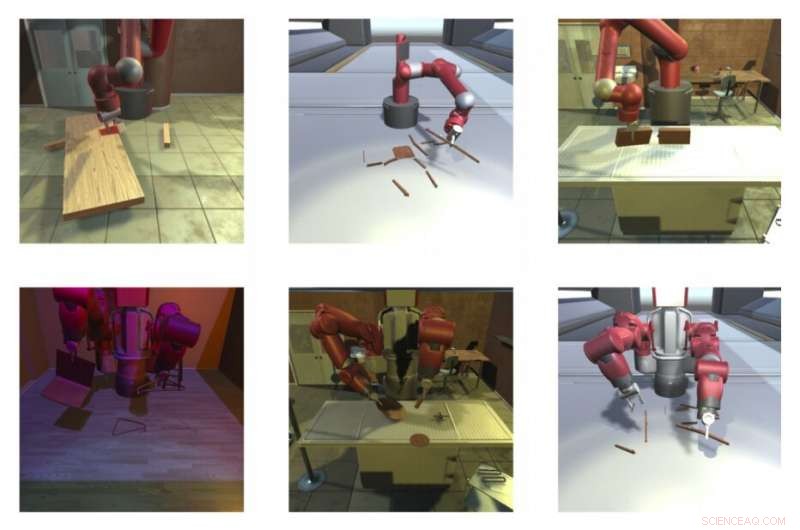
Captures d'écran de l'environnement d'assemblage de meubles IKEA. Crédit :Lee et al.
Afin d'accomplir des tâches quotidiennes complexes telles que l'utilisation d'équipement, cuisiner ou fabriquer des meubles, les robots devraient être capables de planifier leurs actions et de manipuler des objets dans leur environnement. Jusque là, cependant, apprendre aux robots à accomplir des tâches compliquées, tels que ceux qui nécessitent une planification sur une période de temps considérable, s'est avéré assez difficile, également en raison d'un manque d'environnements simulés fiables pour les tester.
Avec ça en tête, des chercheurs de l'Université de Caroline du Sud ont récemment développé l'environnement d'assemblage de meubles IKEA, une plate-forme de simulation où les chercheurs peuvent tester des agents d'intelligence artificielle (IA) sur des tâches de manipulation complexes. Dans l'environnement qu'ils ont développé, présenté dans un article prépublié sur arXiv, les agents peuvent être évalués sur une variété de tâches de manipulation qui impliquent la construction et la manipulation de différents éléments de mobilier.
"L'environnement est conçu pour faire progresser l'apprentissage par renforcement, des simples tâches ludiques aux tâches complexes nécessitant à la fois une planification à long terme et un contrôle sophistiqué de bas niveau, ", ont écrit les chercheurs dans leur article.
L'assemblage de meubles peut être une tâche difficile, même pour les humains, car cela nécessite généralement à la fois une planification à long terme et des compétences de manipulation sophistiquées. L'environnement développé par les chercheurs, qui est assez simple d'utilisation, a plusieurs fonctions intéressantes. Comme il génère une grande quantité de données synthétiques étiquetées, il peut être utilisé pour former des modèles de vision par ordinateur sur un large éventail de tâches, y compris l'estimation de la pose de l'objet, compréhension de la scène, et beaucoup plus, sans nécessiter de données annotées par l'homme.
En outre, l'environnement pourrait servir de référence pour les méthodes d'apprentissage automatique conçues pour l'assemblage de meubles ou d'autres tâches de manipulation à long terme, améliorer leurs capacités de contrôle et de planification. De façon intéressante, les données visuelles et interactives produites par la plateforme peuvent également être utilisées pour acquérir des connaissances spécifiques au domaine pour d'autres applications, tels que les modèles physiques intuitifs.
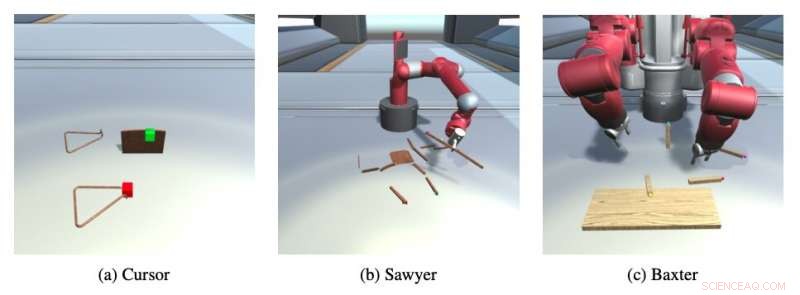
Les trois robots actuellement supportés par la plateforme. Crédit :Lee et al.
L'environnement d'assemblage de meubles IKEA prend en charge plus de 80 modèles de meubles et peut être personnalisé avec des images d'arrière-plan, éclairage et textures. Il pourrait finalement être considéré comme un banc d'essai pour les techniques d'apprentissage automatique conçues pour donner aux robots des compétences avancées en matière de manipulation d'objets.
Jusque là, l'environnement peut être utilisé pour entraîner ou tester trois robots de formes et de tailles différentes, appelé curseur, Sawyer et Baxter. Dans la prochaine mise à jour, cependant, les chercheurs prévoient également d'ajouter un support pour Fetch, UR, Jaco et d'autres robots populaires.
À l'avenir, cet environnement personnalisable pourrait ouvrir de nouvelles possibilités de formation et d'évaluation de nombreuses techniques d'apprentissage automatique pour les applications robotiques. En attendant, les chercheurs prévoient de mettre à jour la plate-forme et d'améliorer certaines de ses fonctions.
Par exemple, ils aimeraient ajouter la prise en charge des dispositifs de mouvement 3D, permettant aux utilisateurs de faire fonctionner des robots à distance et de créer des vidéos de démonstration à l'aide d'un contrôleur VR ou d'une souris 3D. Ces vidéos de démonstration pourraient ensuite être utilisées pour former des modèles d'apprentissage automatique, en utilisant une stratégie connue sous le nom d'apprentissage par imitation.
Dans les futures versions de la plateforme, les utilisateurs pourraient également être autorisés à guider les robots via des instructions vocales, et pourrait même être en mesure de former plusieurs agents simultanément. De plus, les robots pourraient éventuellement être formés à l'utilisation d'outils spécifiques, tels que des tournevis et des marteaux.
© 2019 Réseau Science X














