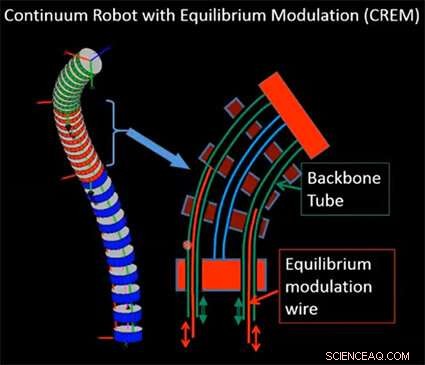
Augmentation d'une macro-échelle existante, Le robot multi-épines avec des capacités de mouvement à l'échelle du micron est obtenu en ajoutant des fils (rouges) à l'intérieur de la structure qui peuvent glisser dans et hors des épines dorsales tubulaires. Cela permet de moduler la forme d'équilibre. Le robot réalise toujours un mouvement (macro) à grande échelle en utilisant les épines dorsales tubulaires fixées de manière rigide au disque rouge supérieur. Par actionnement direct, les pousser et les tirer, la configuration du robot continuum change. Crédit :Université Vanderbilt
Un nouveau robot continuum conçu par les ingénieurs de Vanderbilt réalise un mouvement à plusieurs échelles et peut ouvrir un vaste monde de microchirurgies complexes auparavant impossibles.
Le robot est capable de fournir à la fois un grand espace de travail de macro mouvements si nécessaire pour une intervention chirurgicale et un petit espace de travail de micro mouvements avec des résolutions de mouvement de 1 micron ou moins. Pour un sens de l'échelle, un pouce en contient 25, 400 microns. Un globule rouge humain mesure environ huit microns de large, la même taille que certaines bactéries et nettement plus petite que la largeur d'un cheveu humain moyen.
"Notre conception atteint des résolutions de mouvement de 1 micron ou moins en utilisant des actionneurs peu coûteux. Cette reconfiguration, avec un coût supplémentaire minime, pourrait accélérer le développement d'une nouvelle classe de robots chirurgicaux capables à la fois de macro-mouvement pour une intervention chirurgicale et de mouvement à micro-échelle pour imagerie ou intervention au niveau cellulaire, " dit Nabil Simaan, professeur de génie mécanique et directeur du Laboratoire de robotique avancée et d'applications mécaniques.
"Cela étend considérablement les capacités de la robotique en chirurgie mini-invasive, " il a dit.
La miniaturisation et l'amplitude des mouvements permettraient un contrôle précis lors des interventions sur des anévrismes complexes, petites veines et artères, nerfs et les structures délicates de l'œil, l'oreille interne et les cordes vocales. Les applications potentielles comprennent les biopsies, l'éradication des tumeurs et l'administration ciblée de médicaments au niveau cellulaire.
Simaan et son équipe ont adapté l'architecture flexible de son précédent robot continuum pour fonctionner à l'échelle macro et micro en modifiant la pose d'équilibre du robot, que Simaan appelle robots continus avec modulation d'équilibre, ou CREM.
L'architecture flexible des robots continus précédents a réalisé un mouvement de type ver pour la macro-manipulation. Le robot est segmenté avec des disques ou des anneaux comme le corps d'un ver de terre. Chaque disque est relié par de minuscules épines dorsales, ou des tubes d'actionnement. En ajoutant de petits fils élastiques à l'intérieur des tubes d'actionnement et en déplaçant les fils vers le haut ou vers le bas, l'équilibre statique des plaques change, créer un mouvement à l'échelle micrométrique.
« Cette nouvelle classe de robots fournira une micro-précision tout en parcourant des voies sinueuses à grande échelle jusqu'au site d'opération. Les avantages potentiels incluent la reconstruction exacte des tissus et l'éradication chirurgicale complète des tumeurs, " dit Siman, une filiale de l'Institut Vanderbilt de chirurgie et d'ingénierie.
Le robot utilise des colonnes vertébrales secondaires tubulaires pour réaliser la grande échelle de mouvement. En les poussant et en tirant dessus, la configuration du robot continuum change. L'ajout de fils qui peuvent glisser dans et hors des épines dorsales tubulaires a permis à l'équipe de recherche de moduler la forme d'équilibre.
En outre, des tests approfondis sont en cours pour l'incorporation de la tomographie par cohérence optique, qui est en fait une "échographie optique" qui permet d'obtenir des réflexions d'imagerie depuis l'intérieur des tissus.
Simaan et ses collègues, étudiant diplômé en génie mécanique Giuseppe Del Giudice, Professeur assistant de recherche en ophtalmologie et sciences visuelles Jin-Hui Shen et médecin Karen M. Joos, Joseph N. et Barbara H. Ellis Family Professeur d'ophtalmologie, ont réalisé une intégration préliminaire d'une sonde OCT sur mesure.
L'intérêt de recherche particulier de Joos est l'utilisation de sondes OCT miniatures avec des outils chirurgicaux robotiques pour améliorer la visualisation des procédures à l'intérieur de l'œil. L'expertise de Del Giudice est dans la conception et le contrôle de robots médicaux en micro-continuum, spécifiquement la micromanipulation pour la chirurgie ophtalmique.
L'extension des capacités d'un robot continuum standard en termes de mouvement et de ciblage à micro-échelle pourrait avoir un impact profond en microchirurgie en offrant une dextérité considérablement accrue, contrôlabilité et précision pour les chirurgiens ou même le pionnier de procédures auparavant impossibles, dit Siman.