Résultat de la simulation d'une articulation du coude effectuant une flexion articulaire isocinétique. Humérus, le cubitus et le radius sont modélisés avec des filaments rigides en violet. Les tendons sont modélisés avec des filaments effilés en jaune. Deux têtes de biceps composées de 36 filaments effectuent une contraction volontaire maximale. Des conditions aux limites sont appliquées pour assurer une vitesse angulaire constante. Crédit :Nature Communications, doi:10.1038/s41467-019-12759-5
Les scientifiques de la vie et les bio-ingénieurs étudient les systèmes et organismes naturels pour comprendre leurs mécanismes biophysiques, afin de conduire des applications d'ingénierie biomimétique en laboratoire. Dans un récent rapport sur Communication Nature , Xiaotian Zhang et ses collègues des départements de génie mécanique et d'applications de calcul intensif aux États-Unis ont présenté une approche numérique pour simuler les architectures musculo-squelettiques. La méthode reposait sur l'assemblage de tiges de Cosserat actives et passives hétérogènes (une courbe à base de tiges dirigées déformables) dans des structures dynamiques pour modéliser les os, tendons, ligaments, fibres et connectivité musculaire. Ils ont démontré des applications de la technique en résolvant une gamme de problèmes dans des scénarios biologiques et robotiques doux dans de nombreux environnements et échelles. L'équipe a conçu des robots bio-hybrides à l'échelle millimétrique et reconstruit des systèmes musculo-squelettiques complexes. La méthode est polyvalente et offre un cadre pour aider les conceptions de bio-ingénierie avant et arrière pour des découvertes fondamentales sur les fonctions des organismes vivants.
Les systèmes musculo-squelettiques contiennent des os, muscles, tendons et ligaments de fonctionner ensemble dans les systèmes biologiques indigènes. Curieusement, de telles architectures contiennent un lien indissociable entre l'actionnement et le contrôle, topologie et mécanique dues aux constituants non linéaires. En contraste frappant avec les robots à corps rigide, les créatures biologiques molles peuvent mettre en œuvre des déformations et des instabilités structurelles pour fonctionner au sein de complexes, environnements non structurés et dynamiques. Les architectures musculo-squelettiques biologiques possèdent une distributivité intrinsèque, douceur et conformité pour sous-traiter les tâches de contrôle à une variété de compartiments. Cette propriété fournit la base d'un paradigme émergent en robotique d'inspiration biologique connu sous le nom de calcul morphologique ou d'intelligence mécanique. Les considérations ont conduit à une variété d'avancées expérimentales en robotique souple avec des matériaux artificiels conformes pour former des robots bio-hybrides souples. Malgré les avancées expérimentales dans le domaine, les efforts pour modéliser et simuler les architectures musculo-squelettiques dynamiques à travers les structures biologiques et synthétiques restent à accomplir.
Simuler l'articulation du coude humain
Zhang et al. a d'abord démontré une méthode pour inclure une dynamique complète de déformation telle que le pli, tourner, cisaillement et étirement impliqués dans les architectures biologiques. Pour ça, ils se sont appuyés sur des travaux antérieurs sur les tiges de cosserat pour établir une approche de modélisation musculo-squelettique afin de simuler de manière réaliste des actifs, dispositions biologiques hétérogènes dans une approche par étapes pour synthétiser et reproduire des architectures vivantes avec des couches biologiques de complexité pour des applications biomimétiques avancées. Le travail leur a permis de reproduire des systèmes biologiques en imitant la biomécanique sous-jacente et a permis d'étudier et de comprendre les fonctions biophysiques des organismes biologiques dans le silicium. L'étude a démontré que les applications des modèles de tiges jouent un rôle précieux dans la modélisation de systèmes actifs complexes pour les architectures biomimétiques.
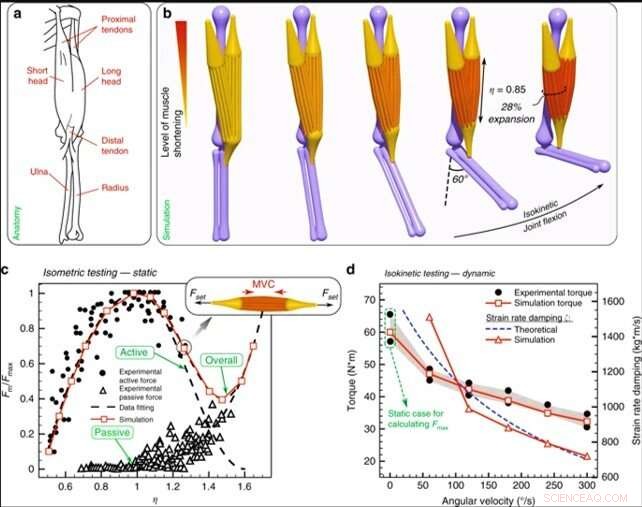
Actionnement du coude humain. (a) Anatomie du coude. (b) Simulation d'un coude composé de trois os (humérus, cubitus et radius) et deux têtes de biceps (tête courte et tête longue) réalisant une flexion complète. (c) Données expérimentales et simulations pour la force active et passive normalisée avec la force maximale (Fm/Fmax) pendant l'exercice isométrique (Fset imite la résistance rencontrée par le muscle et résulte en sa longueur d'équilibre ). (d) Mesures expérimentales et de simulation du couple de l'articulation du coude (incliné à 60 °) effectuant des flexions concentriques isocinétiques maximales à différentes vitesses angulaires ainsi que l'amortissement global correspondant du taux de déformation musculaire ζ. Les déterminés numériquement sont ensuite comparés aux estimations théoriques basées sur le modèle de Hill. Crédit :Nature Communications, doi:10.1038/s41467-019-12759-5
Lors de la première simulation biomimétique, Zhang et al. utilisé une articulation du coude humain avec des muscles, tendons et os pour illustrer les assemblages de tiges mappés à la physiologie, dynamique et morphologie. Par exemple, l'articulation du coude a montré des caractéristiques molles et rigides, dynamique simplifiée et espace de configuration réduit. L'analyse leur a permis de vérifier et de calibrer le modèle sur la base de données anatomiques et biomécaniques facilement disponibles pour se rapporter au modèle de Hill. Le niveau de détail de la représentation leur a permis de répondre aux besoins kinésiologiques spécifiques du patient humain et de reconstruire virtuellement une réplique 3D d'une articulation du coude humain à l'aide de tests isométriques et isocinétiques applicables à l'ingénierie du tissu osseux. Les scientifiques pourraient modéliser, calibrer et valider l'actionnement d'une unité musculaire individuelle, où le résultat reproduit la dynamique et la morphologie d'un système biologique. L'approche de modélisation actuelle présentait des caractéristiques clés la distinguant du modèle de Hill, pour inclure (a) des tiges individuelles pour un recrutement sélectif pour imiter une blessure, et (b) des muscles souples qui peuvent se plier, torsion et cisaillement de façon réaliste aux forces dynamiques sur l'ensemble de la structure ou dans l'environnement.
Ingénierie des robots bio-hybrides
Dans l'expérience suivante, l'équipe a conçu des robots bio-hybrides à l'aide de leur solveur informatique pour guider la conception et la fabrication de robots bio-hybrides nageant et marchant à l'échelle millimétrique. Pour étudier le comportement de nage des robots, ils ont d'abord résolu des problèmes en utilisant la modélisation numérique et les simulations d'un flagelle bio-hybride précédemment établi. Pour ça, ils ont créé une réplique exacte du nageur d'origine et modélisé le substrat de polydiméthylsiloxane (PDMS) pour imiter la géométrie expérimentale et les propriétés matérielles avec des cellules vivantes en cluster modélisées comme un petit, filament mou et contractile relié au substrat. Les observations qualitatives et quantitatives du mouvement de nage entre la simulation et l'expérience correspondaient bien.
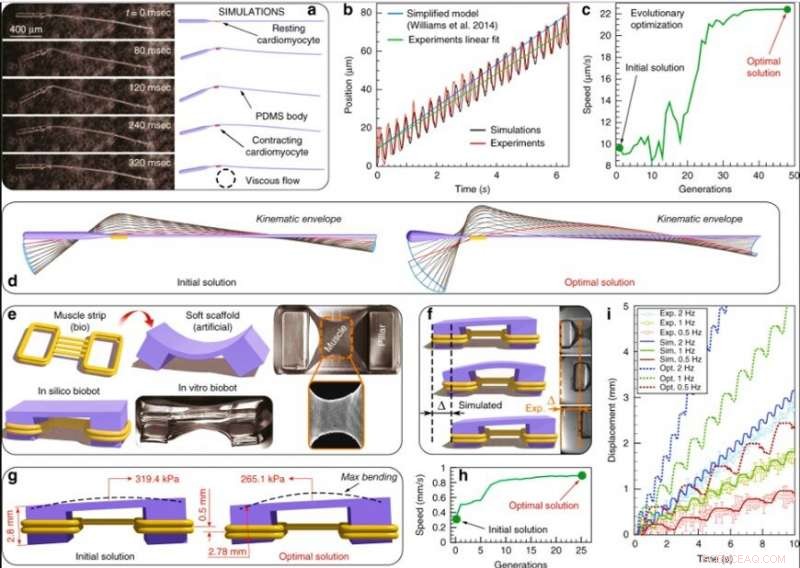
Conception robotique bio-hybride. (a) Comparaison individuelle du robot avec des photographies expérimentales à différents stades d'un cycle de natation. (b) Position axiale du centre du robot surveillée sur plus de 20 cycles par rapport aux données expérimentales. (c) Cours d'optimisation :La convergence vers la solution optimale est observée après 48 générations. L'optimisation a été contrainte avec une longueur de tête comprise entre [0, 1.927]mm, rayon de la tête dans [4, 40]μm, rayon de la queue dans [4, 6,5]μm et emplacement de la cellule à n'importe quel point le long de la queue. La dimension longitudinale du bot est fixée à L=1.927mm, de sorte que la longueur de la queue peut être déduite de la longueur de la tête. Les plages de paramètres sont déterminées pour tenir compte de la capacité de fabrication réelle. (d) Visualisation des conceptions originales et optimales montrant les configurations au repos et les enveloppes cinématiques médianes sur une période. Détails originaux du nageur :le substrat est modélisé avec une tête de 424 μm de long et une queue de 1503 μm de long avec des rayons de 20 μm et 7 μm respectivement. Densité =0.965gcm−3, module d'Young E=3.86MPa, rigidité à la flexion EI=2.427×10−9Nmm2, masse m=7.364×10-7g sont fixés. La cellule contractile est modélisée avec un rayon de 10μm et une longueur de 100μm. La cellule est réglée pour produire une force de contraction F=σmA=12μN avec une fréquence de battement f=3,6Hz23. Le fluide a une viscosité dynamique μ=1,2×10−3Pa⋅s. Détails optimisés pour le nageur :le substrat a une longueur et un rayon de 190 m et 32,3 μm, respectivement. La cellule contractile est attachée à 190 m de la tête et la queue a une épaisseur de 4,3 m. (e) Conception générale du déambulateur avec des éléments jaunes représentant des anneaux musculaires et des éléments violets représentant le squelette. Images expérimentales adaptées d'études précédentes. (f) Simulations versus expériences :Déplacement du Bot sur 2 secondes pour la fréquence d'actionnement 1 Hz. (g) Visualisation de la conception initiale et optimisée du déambulateur. (h) Le cours d'optimisation converge après 25 générations. L'optimisation a été contrainte par le module de Young du squelette [250-350] kPa, longueur du pilier le plus court [2,4–3,4] mm et emplacement de la bande musculaire [0,5–3] mm (distance du sol), le tout choisi en fonction de contraintes de fabricabilité. (i) Comportement dynamique du marcheur simulé (traits pleins) et expérimental (marqueurs avec barres d'erreur) avec contraction musculaire à différentes fréquences, et comparaison des performances de marche entre la conception initiale (lignes pleines) et la conception optimisée (lignes pointillées). Crédit :Nature Communications, doi:10.1038/s41467-019-12759-5
Après modélisation et optimisation du nageur bio-hybride, ils ont tenté de concevoir informatiquement un marcheur bio-hybride tel que développé précédemment pour former la machine biologique mobile la plus rapide à ce jour par Pagan-Diaz et al., basé sur un précédent robot bio-hybride. Structurellement, le modèle Pagan-Diaz contenait un échafaudage hydrogel asymétrique et des tissus musculaires squelettiques pour ressembler aux relations muscle-tendon-os in vivo et fonctionnait dans un bain de solution en laboratoire. Expérimentalement, ils ont suspendu les muscles et les ont électrocutés pour induire une contraction pour le mouvement via l'asymétrie et la friction.
Zhang et al. simulé cette architecture dans le présent travail, pour concevoir un nouvel échafaudage et des arrangements musculaires topologiques du bot. La nouvelle topologie des tissus musculaires contenait une fine section de bande reliant deux anneaux enroulés autour des jambes du squelette pour transférer les forces de contraction musculaire, qu'ils ont testés à l'aide d'études de référence. Zhang et al. démontré expérimentalement le plan de calcul avec le modèle Pagan-Diaz pour construire un nouveau bio-bot avec une vitesse deux fois plus rapide que le robot bio-hybride d'origine ; avec un bon accord observé dans la simulation. L'équipe de recherche a montré le potentiel de l'approche informatique pour encapsuler la physique des systèmes robotiques souples alimentés par des cellules et des muscles pour les applications souhaitées afin de concevoir des prototypes plus flexibles.

Mouvement de glissement du modèle de serpent musculo-squelettique avec quatre groupes musculaires. Les arrangements des groupes musculaires sont optimisés pour la vitesse d'avancement la plus rapide. La couleur des groupes musculaires indique le niveau de contraction musculaire. Crédit :Nature Communications, doi:10.1038/s41467-019-12759-5.
Ingénierie des serpents rampants
L'équipe a ensuite utilisé l'approche numérique conçue dans le cadre de l'étude pour faciliter la fabrication du robot bio-hybride et comprendre la biomécanique. Les bioingénieurs avaient déjà mené plusieurs expériences sur la locomotion des serpents pour construire des répliques de robots cibles à l'aide de servomoteurs (actionneurs rotatifs). Dans la présente expérience, ils ont développé un serpent élastique complètement doux bio-inspiré de vrais serpents mais actionné efficacement avec plusieurs groupes de tendons musculaires pour obtenir un mouvement ondulatoire fluide. L'équipe de recherche a montré que si les serpents biologiques avaient plusieurs muscles pour orchestrer les démarches et les déformations du corps, le modèle ne nécessitait que peu de fonctionnalités pour glisser en douceur et efficacement vers l'avant.
Pour une conception optimale, les scientifiques ont couplé leur solveur informatique à l'algorithme de stratégie d'adaptation-évolution de la matrice de covariance (CMA-ES) pour identifier les emplacements et les modèles d'actionnement pour une vitesse d'avancement maximale. Zhang et al. comparé et vérifié les résultats avec des simulations de référence et des enregistrements expérimentaux. L'équipe visait principalement à révéler les principes de conception architecturale cachés et à exposer leur fonction à des fins d'ingénierie. Ils ont soigneusement orchestré un actionnement distribué pour des démarches réalistes et fluides contrastant fortement avec leurs homologues de robots serpents rigides. Les chercheurs ont également mis en place un cadre pour simplifier, tester et utiliser les principes biomécaniques de systèmes biologiques complexes pour créer un glissement réaliste, vite, serpent robotique souple basé sur quelques actionneurs simples.
La vue de face d'une paire d'ailes constituées de 6342 filaments, où les filaments verts indiquent les plumes. Un processus d'initiation soulève les ailes de la position à plat et est suivi d'une seule course descendante et ascendante pendant la phase de décollage. Crédit :Nature Communications, doi:10.1038/s41467-019-12759-5.
Ailes à plumes d'ingénierie
Démontrer une stratégie de locomotion plus complexe qui inclut des structures biologiques supplémentaires avec des fonctions critiques, l'équipe a développé une plume, aile d'oiseau musculo-squelettique in silico. Les bioingénieurs avaient déjà mené diverses études pour comprendre les caractéristiques biophysiques du vol des oiseaux, des schémas d'activation musculaire à la biomécanique des plumes. Dans le travail present, Zhang et al. considéré la structure dynamique de l'aile d'un pigeon et reconstitué les plumes in silico avec une rigidité en flexion, cohérent avec les études précédentes.
Au total, ils ont connecté 19 plumes au modèle informatique de l'aile conforme aux données biologiques du pigeon voyageur. Ils comprenaient quatre muscles associés aux articulations de l'épaule et du coude pour contrôler l'actionnement et le morphing des ailes par rapport au modèle d'articulation du coude humain. Bien que ce premier modèle d'étude n'ait pas capturé l'aérodynamique complexe associée au vol battant, il a fourni une estimation préliminaire. L'équipe a reproduit la cinématique du morphing des ailes pendant le décollage et a basé les schémas d'actionnement musculaire sur des signaux d'électromyographie (EMG) enregistrés expérimentalement précédemment acquis.
De cette façon, Xiaotian Zhang et une équipe de chercheurs ont présenté une nouvelle méthode d'assemblage hétérogène, cannes cosserat actives et passives pour simuler la dynamique, architectures musculo-squelettiques pouvant subir des déformations pour faciliter les mouvements biomimétiques. L'approche a abordé un manque existant de techniques d'ingénierie en robotique douce pour combler l'écart entre la modélisation des corps rigides et les simulations par la méthode des éléments finis (FEM) haute fidélité.
En utilisant les caractéristiques favorables développées dans l'étude, l'équipe de recherche a conçu des systèmes à corps mou pour résoudre un certain nombre de problèmes relatifs à la robotique douce et aux structures biologiques complexes dans divers environnements. Les nouveaux travaux ont montré la polyvalence de l'approche pour établir une stratégie prometteuse pour une large gamme d'applications à travers la bio-ingénierie des structures d'inspiration biologique pour découvrir les caractéristiques sous-jacentes des organismes vivants.
© 2019 Réseau Science X