Un nouvel algorithme accélère le processus de planification des pinces robotiques pour manipuler des objets en utilisant l'environnement environnant. Crédit :MIT
Si vous êtes à un bureau avec un stylo ou un crayon à portée de main, essayez ce mouvement :saisissez le stylo par une extrémité avec votre pouce et votre index, et poussez l'autre extrémité contre le bureau. Faites glisser vos doigts le long du stylo, puis retournez-le, sans le laisser tomber. Pas trop difficile, droit?
Mais pour un robot, disons, celui qui trie une corbeille d'objets et tente de bien comprendre l'un d'entre eux - c'est une manœuvre informatique exigeante. Avant même de tenter le mouvement, il doit calculer une litanie de propriétés et de probabilités, tels que le frottement et la géométrie de la table, le stylo, et ses deux doigts, et comment diverses combinaisons de ces propriétés interagissent mécaniquement, basé sur les lois fondamentales de la physique.
Les ingénieurs du MIT ont maintenant trouvé un moyen d'accélérer considérablement le processus de planification requis pour qu'un robot ajuste sa prise sur un objet en poussant cet objet contre une surface fixe. Alors que les algorithmes traditionnels nécessiteraient des dizaines de minutes pour planifier une séquence de mouvements, l'approche de la nouvelle équipe réduit ce processus de pré-planification à moins d'une seconde.
Alberto Rodriguez, professeur agrégé de génie mécanique au MIT, dit que le processus de planification plus rapide permettra aux robots, notamment en milieu industriel, pour comprendre rapidement comment pousser contre, glisser le long, ou autrement utiliser des fonctionnalités dans leurs environnements pour repositionner les objets à leur portée. Une telle manipulation agile est utile pour toutes les tâches qui impliquent la cueillette et le tri, et même l'utilisation d'outils complexes.
"C'est un moyen d'étendre la dextérité des préhenseurs robotiques même simples, car en fin de compte, l'environnement est quelque chose que chaque robot a autour de lui, " dit Rodriguez.
Les résultats de l'équipe sont publiés aujourd'hui dans IThe International Journal of Robotics Research . Les co-auteurs de Rodriguez sont l'auteur principal Nikhil Chavan-Dafle, un étudiant diplômé en génie mécanique, et Rachel Holladay, un étudiant diplômé en génie électrique et en informatique.
La physique dans un cône
Le groupe de Rodriguez travaille à permettre aux robots de tirer parti de leur environnement pour les aider à accomplir des tâches physiques, comme la cueillette et le tri d'objets dans un bac.
Les algorithmes existants prennent généralement des heures pour planifier une séquence de mouvements pour une pince robotique, Principalement parce que, pour chaque motion qu'il considère, l'algorithme doit d'abord calculer si ce mouvement satisferait à un certain nombre de lois physiques, telles que les lois du mouvement de Newton et la loi de Coulomb décrivant les forces de friction entre les objets.
"C'est un processus de calcul fastidieux pour intégrer toutes ces lois, considérer tous les mouvements possibles que le robot peut faire, et d'en choisir une utile parmi celles-ci, " dit Rodriguez.
Lui et ses collègues ont trouvé un moyen compact de résoudre la physique de ces manipulations, avant de décider comment la main du robot doit se déplacer. Ils l'ont fait en utilisant des « cônes de mouvement, " qui sont essentiellement visuels, cartes de friction en forme de cône.
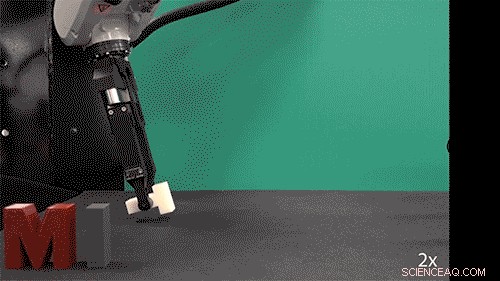
Un nouvel algorithme accélère le processus de planification des préhenseurs robotisés. Un robot dans le laboratoire est montré en train de ramasser une lettre majuscule, T, et en le poussant contre un mur voisin pour le réorienter, avant de le remettre en position verticale. Crédit :Massachusetts Institute of Technology
L'intérieur du cône représente tous les mouvements de poussée qui pourraient être appliqués à un objet à un endroit précis, tout en satisfaisant les lois fondamentales de la physique et en permettant au robot de garder la main sur l'objet. L'espace à l'extérieur du cône représente toutes les poussées qui feraient en quelque sorte glisser un objet hors de l'emprise du robot.
"Des variantes en apparence simples, comme la force avec laquelle le robot saisit l'objet, peut modifier considérablement la façon dont l'objet se déplace dans la prise lorsqu'il est poussé, " explique Holladay. " En fonction de la force avec laquelle vous saisissez, il y aura une motion différente. Et cela fait partie du raisonnement physique que l'algorithme gère."
L'algorithme de l'équipe calcule un cône de mouvement pour différentes configurations possibles entre une pince robotique, un objet qu'il tient, et l'environnement contre lequel il pousse, afin de sélectionner et séquencer différentes poussées possibles pour repositionner l'objet.
"C'est un processus compliqué mais toujours beaucoup plus rapide que la méthode traditionnelle, suffisamment rapide pour que la planification d'une série entière de poussées prenne une demi-seconde, " dit Holladay.
De grands projets
Les chercheurs ont testé le nouvel algorithme sur une configuration physique avec une interaction à trois voies, dans lequel une simple pince robotique tenait un bloc en forme de T et poussait contre une barre verticale. Ils ont utilisé plusieurs configurations de départ, avec le robot saisissant le bloc à une position particulière et le poussant contre la barre sous un certain angle. Pour chaque configuration de départ, l'algorithme a généré instantanément la carte de toutes les forces possibles que le robot pourrait appliquer et la position du bloc qui en résulterait.
"Nous avons fait plusieurs milliers de push pour vérifier que notre modèle prédit correctement ce qui se passe dans le monde réel, " Holladay dit. " Si nous appliquons une poussée qui est à l'intérieur du cône, l'objet saisi doit rester sous contrôle. Si c'est dehors, l'objet doit glisser de la prise."
Les chercheurs ont découvert que les prédictions de l'algorithme correspondaient de manière fiable au résultat physique en laboratoire, planifier des séquences de mouvements, comme réorienter le bloc contre la barre avant de le poser sur une table en position verticale, en moins d'une seconde, par rapport aux algorithmes traditionnels qui prennent plus de 500 secondes à planifier.
"Parce que nous avons cette représentation compacte de la mécanique de cette interaction à trois voies entre le robot, objet, et leur environnement, nous pouvons maintenant nous attaquer à des problèmes de planification plus importants, " dit Rodriguez.
Le groupe souhaite appliquer et étendre sa démarche pour permettre à une pince robotisée de manipuler différents types d'outils, par exemple dans un environnement de fabrication.
"La plupart des robots d'usine qui utilisent des outils ont une main spécialement conçue, donc au lieu d'avoir la capacité de saisir un tournevis et de l'utiliser de différentes manières, ils font juste de la main un tournevis, " Holladay dit. " Vous pouvez imaginer que cela nécessite une planification moins adroite, mais c'est beaucoup plus limitatif. Nous aimerions qu'un robot puisse utiliser et ramasser beaucoup de choses différentes."