Le robot utilisé dans cette expérience était une machine de marque Minitaur avec des jambes. Crédit :Georgia Tech / Neveln
Euh, un cafard! Mais il se ferme avant que la tapette n'apparaisse. Maintenant, les chercheurs ont tiré parti des superbes compétences de dépouillement du bogue pour créer une méthode intelligemment simple pour évaluer et améliorer la locomotion chez les robots.
Normalement, modélisation fastidieuse de la mécanique, électronique, et la science de l'information est nécessaire pour comprendre comment les pièces mobiles des insectes ou des robots se coordonnent en douceur pour les placer. Mais dans une nouvelle étude, Des chercheurs en biomécanique du Georgia Institute of Technology ont réduit les sprints de cafards à des principes et des équations pratiques qu'ils ont ensuite utilisés pour améliorer le fonctionnement d'un robot de test.
La méthode a expliqué aux chercheurs comment chaque jambe fonctionne de manière autonome, comment ils se réunissent tous ensemble, et l'harmonie ou l'absence de celle-ci dans la façon dont ils le font. Malgré la dynamique de mouvement totalement divergente des bugs et des bots, la nouvelle méthode a fonctionné pour les deux et devrait fonctionner pour d'autres robots et animaux, trop.
Le robot biologique, le gardon, était le coureur de loin supérieur avec des signaux neurologiques guidant six jambes impeccablement évoluées. Le robot mécanique, un modèle de consommation, avait quatre jambes trapues et aucun système nerveux, mais s'appuyait plutôt sur le contrôle de la locomotion sur des forces physiques grossières qui traversaient son châssis en tant que signaux bruts pour coordonner à peu près sa démarche maladroite.
"Le robot était beaucoup plus volumineux et pouvait à peine sentir son environnement. Le cafard avait de nombreux sens et s'adapte mieux aux terrains accidentés. Des bosses aussi hautes que ses hanches ne le ralentiraient pas du tout, " dit Izaak Neveln, le premier auteur de l'étude, qui était chercheur postdoctoral dans le laboratoire de Simon Sponberg à Georgia Tech pendant l'étude.
Simplicité avancée
La méthode, ou "mesurer, " comme l'appelle l'étude, transcendé ces énormes différences, qui imprègnent la robotique inspirée des animaux.
"La mesure est générale (universelle) dans le sens où elle peut être utilisée indépendamment du fait que les signaux soient des modèles de pointes neuronales, cinématique, tensions ou forces et ne dépend pas de la relation particulière entre les signaux, " ont écrit les auteurs de l'étude.
Peu importe comment un bogue ou un bot fonctionne, les entrées et sorties mathématiques de la mesure sont toujours dans les mêmes unités. La mesure n'éliminera pas toujours le besoin de modélisation, mais cela a pour but de raccourcir et de guider la modélisation et d'éviter des faux pas angoissants.
Les auteurs ont publié l'étude dans la revue Communication Nature en août 2019. La recherche a été financée par la National Science Foundation. Sponberg est professeur adjoint à l'École de physique de Georgia Tech et à l'École des sciences biologiques.
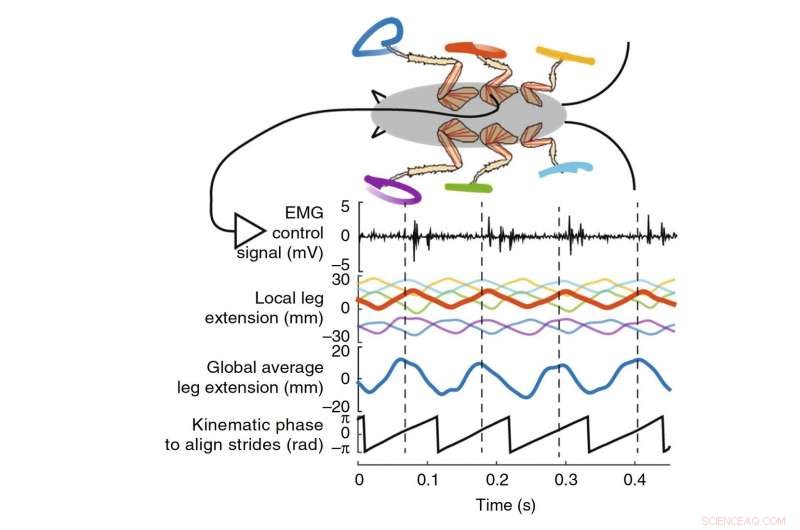
Les oscillations des pattes du cafard peuvent être représentées graphiquement de la même manière que les oscillations d'un pendule en ondes sinusoïdales. Ceux-ci conduisent à une meilleure compréhension mathématique de la locomotion de l'insecte. Crédit :Georgia Tech / Sponberg / Neveln
Centralisation vs. décentralisation
Souvent, un robot ou un animal envoie de nombreux signaux de marche via un système central pour harmoniser la locomotion, mais tous les signaux ne sont pas centralisés. Même chez l'homme, bien que la locomotion dépende fortement des signaux du système nerveux central, certains signaux neuronaux sont confinés à des régions du corps ; ce sont des signaux localisés.
Certains insectes semblent se déplacer avec peu de centralisation, comme les phasmes, également connu sous le nom de bâtons de marche, dont les jambes poussent presque indépendamment. Les punaises de bâton sont des coureurs bancals.
"L'idée a été que les punaises de bâton ont le contrôle le plus localisé du mouvement, alors qu'un cafard va très vite et doit rester stable, et son contrôle de mouvement est probablement plus centralisé, plus horloger, " a déclaré Neveln.
Une forte centralisation des signaux coordonne généralement mieux la locomotion. Il pourrait s'agir de code voyageant dans le câblage d'un robot élaboré, les neurones centraux d'un cafard synchronisant ses pattes, ou le châssis du robot maladroit s'inclinant loin d'une jambe frappant le sol mettant ainsi du poids sur une jambe opposée. Les roboticiens doivent voir à travers les différences et comprendre l'interaction des signaux locaux et centraux d'un locomoteur.
Physique sympa
La nouvelle "mesure" le fait en se concentrant sur un phénomène global dans les jambes qui marchent, qui peut être vu comme un pendule se déplaçant d'avant en arrière. Pour une bonne locomotion, ils doivent se synchroniser dans ce qu'on appelle des oscillations de couplage de phase.
Amusant, une expérience simple illustre ce principe de physique. Si quelques-uns, dis six, les métronomes - les pendules rythmiques que les professeurs de piano utilisent - se désynchronisent, et vous les placez tous sur une plate-forme qui se balance librement avec les balancements des métronomes, les balançoires se synchroniseront à l'unisson.
Les phases, ou des indications, de leurs oscillations se couplent entre elles en centralisant leurs impulsions mécaniques composites à travers la plate-forme. Cet exemple particulier de couplage de phase est mécanique, mais il peut aussi être informatique ou neurologique, comme chez le gardon.
Ses jambes seraient analogues aux métronomes oscillants, et une activité neuromusculaire centrale analogue à la plate-forme à balancement libre. Dans le gardon, les six jambes ne se balancent pas dans la même direction.
"Leur synchronisation n'est pas uniforme. Trois jambes sont synchronisées en phase les unes avec les autres - les jambes avant et arrière d'un côté avec la jambe du milieu de l'autre côté - et ces trois sont synchronisées en déphasage avec les trois autres, " dit Neveln. " C'est une démarche alternée sur trépied. Un trépied à trois pieds alterne avec l'autre trépied à trois pieds."
Pogo inutile
Et tout comme le pendule, les oscillations de chaque jambe peuvent être représentées graphiquement comme une vague. Toutes les vagues des jambes peuvent être moyennées en une vague globale de roach, puis développées en mathématiques plus utiles qui relient la centralisation à la décentralisation et à des facteurs tels que l'entropie qui peuvent perturber le contrôle de la locomotion.
Les principes et les mathématiques qui en ont résulté ont profité au robot maladroit, qui a de forts signaux décentralisés dans ses moteurs de jambe qui réagissent au contact de la jambe avec le sol, et un contrôle centralisé plus faible que celui du stick bug. Les chercheurs ont représenté graphiquement les mouvements du robot, trop, mais ils n'ont pas abouti au groupe de vagues parfaitement synchronisé que le cafard avait.
Les chercheurs se sont tournés avec les principes et les mathématiques vers le robot maladroit, ce qui était initialement de mauvaise humeur - se cabrer ou sauter inutilement comme un bâton de pogo. Ensuite, les scientifiques ont renforcé le contrôle centralisé en repondérant son châssis pour le rendre plus cohérent.
"Les métronomes sur la plate-forme sont à couplage mécanique, et notre robot coordonne le contrôle de cette façon, " dit Neveln. " Vous pouvez changer l'accouplement mécanique du robot en repositionnant ses poids. Nous avons pu prédire les changements que cela entraînerait en utilisant la mesure que nous avons développée à partir du cafard."
Surprises de cafards
Les chercheurs ont également câblé des muscles et des neurones spécifiques du gardon pour observer leurs syncopes avec les ondes précipitées. Dix-sept cafards en ont pris 2, 982 foulées pour informer les principes et les mathématiques, et les insectes ont également surpris les chercheurs.
L'un d'eux est ressorti :les scientifiques pensaient que la signalisation était plus centralisée lorsque le gardon accélérait, mais plutôt, la signalisation tant centrale que locale renforcée, peut-être en doublant le message : fuyez !