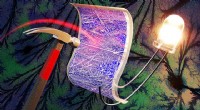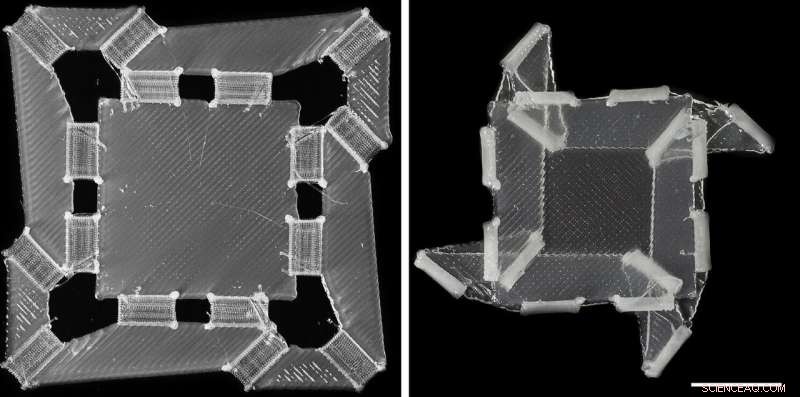
Unité d'origami torsadée carrée. Crédit :Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
La majorité des robots mous reposent aujourd'hui sur une alimentation et un contrôle externes, en les gardant attachés à des systèmes externes ou gréés avec des composants durs. Maintenant, des chercheurs de la Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) et de Caltech ont développé des systèmes robotiques souples, inspiré de l'origami, qui peut bouger et changer de forme en réponse à des stimuli externes, ouvrant la voie à des robots mous entièrement non attachés.
La recherche est publiée dans Robotique scientifique .
« La capacité d'intégrer des matériaux actifs dans des objets imprimés en 3D permet la conception et la fabrication de classes entièrement nouvelles de matière robotique molle, " a déclaré Jennifer A. Lewis, le professeur Hansjorg Wyss d'ingénierie biologiquement inspiré à SEAS et co-auteur principal de l'étude.
Les chercheurs se sont tournés vers l'origami pour créer des robots souples multifonctionnels. Par des plis séquentiels, origami peut coder plusieurs formes et fonctionnalités dans une seule structure. En utilisant des matériaux appelés élastomères à cristaux liquides qui changent de forme lorsqu'ils sont exposés à la chaleur, l'équipe de recherche a imprimé en 3D deux types de charnières souples qui se plient à différentes températures et peuvent donc être programmées pour se plier dans un ordre spécifique.
"Avec notre méthode d'impression 3D de charnières actives, nous avons une programmabilité complète sur la réponse en température, la quantité de couple que les charnières peuvent exercer, leur angle de flexion, et l'orientation du pli. Notre méthode de fabrication facilite l'intégration de ces composants actifs avec d'autres matériaux, " a déclaré Arda Kotikian, un étudiant diplômé de SEAS et de la Graduate School of Arts and Sciences et co-premier auteur de l'article.